2024年08月26日
シャフトカップリングがトルクを伝達する際の振動や衝撃を軽減するにはどうすればよいですか?
シャフトカップリングがトルクを伝達する際の振動や衝撃を軽減するために、以下の方法が有効です:
1. 適切なカップリングの選択:
- 振動や衝撃を軽減するためには、柔軟性のあるカップリングを選択することが重要です。エラストマー(ゴム製)カップリングやばねカップリングなど、振動吸収性の高いカップリングを選ぶことで、振動や衝撃を軽減できます。

「写真の由来:5mm-8mm フレキシブルカップリング 18x25mm CNCステッピング モータシャフトカップリング」
2. 軸のアライメント:
- シャフトのアライメントが正確であることも重要です。シャフトが正しく整列している場合、振動や衝撃を軽減しやすくなります。不適切なアライメントは振動や衝撃を増加させる可能性があります。
3. ダンピング素材の使用:
- 振動や衝撃を軽減するために、カップリングにダンピング素材を使用することが効果的です。ダンピング素材は振動を吸収し、システム全体の安定性を向上させます。

「写真の由来:6mm-8mm フレキシブルジョーカップリング 20x30mm CNCステッピング モータシャフトカップリング」
4. 適切な取り付けと保守:
- カップリングを正しく取り付け、保守することも振動や衝撃を軽減するために重要です。適切なトルクでカップリングを固定し、定期的な点検やメンテナンスを行うことで、効果的な振動軽減を実現できます。
5. システム全体の設計:
- システム全体の設計において、振動や衝撃を考慮した設計を行うことも重要です。シャフトやカップリングの配置、荷重分散、振動の伝播経路などを検討し、振動や衝撃を最小限に抑えるように設計することが必要です。
これらの方法を組み合わせて適切な対策を講じることで、シャフトカップリングがトルクを伝達する際の振動や衝撃を効果的に軽減することができます。
1. 適切なカップリングの選択:
- 振動や衝撃を軽減するためには、柔軟性のあるカップリングを選択することが重要です。エラストマー(ゴム製)カップリングやばねカップリングなど、振動吸収性の高いカップリングを選ぶことで、振動や衝撃を軽減できます。

「写真の由来:5mm-8mm フレキシブルカップリング 18x25mm CNCステッピング モータシャフトカップリング」
2. 軸のアライメント:
- シャフトのアライメントが正確であることも重要です。シャフトが正しく整列している場合、振動や衝撃を軽減しやすくなります。不適切なアライメントは振動や衝撃を増加させる可能性があります。
3. ダンピング素材の使用:
- 振動や衝撃を軽減するために、カップリングにダンピング素材を使用することが効果的です。ダンピング素材は振動を吸収し、システム全体の安定性を向上させます。

「写真の由来:6mm-8mm フレキシブルジョーカップリング 20x30mm CNCステッピング モータシャフトカップリング」
4. 適切な取り付けと保守:
- カップリングを正しく取り付け、保守することも振動や衝撃を軽減するために重要です。適切なトルクでカップリングを固定し、定期的な点検やメンテナンスを行うことで、効果的な振動軽減を実現できます。
5. システム全体の設計:
- システム全体の設計において、振動や衝撃を考慮した設計を行うことも重要です。シャフトやカップリングの配置、荷重分散、振動の伝播経路などを検討し、振動や衝撃を最小限に抑えるように設計することが必要です。
これらの方法を組み合わせて適切な対策を講じることで、シャフトカップリングがトルクを伝達する際の振動や衝撃を効果的に軽減することができます。
Posted by emma at
15:05
│Comments(0)
2024年08月19日
ブラシレスDCモータの速度調整アルゴリズムは何ですか?
ブラシレスDCモータの速度調整アルゴリズムにはいくつかの種類がありますが、その中でも一般的なアルゴリズムとしては「PID制御(Proportional-Integral-Derivative control)」が挙げられます。以下に、ブラシレスDCモータの速度調整において使用されるPID制御アルゴリズムの概要を説明します:
PID制御アルゴリズムの概要:
PID制御は、モータの速度を目標値に維持するために使用されるフィードバック制御アルゴリズムです。PID制御は、以下の3つのコンポーネントから構成されます:

「写真の由来:24V 3500RPM 0.47Nm 172W 10.4A Ф57x69mm ブラシレスDCモータ(BLDC)」
1. P(比例)項:
- P項は、目標速度と現在の速度の誤差に比例して制御出力を生成します。誤差が大きいほど出力も大きくなります。
2. I(積分)項:
- I項は、過去の誤差の積算値に比例して制御出力を調整します。積分項は、定常状態での誤差を取り除くのに役立ちます。

「写真の由来:24V 5000RPM 0.019Nm 10W 0.75A 円形 Ф36x40mm ブラシレスDCモータ(BLDC)」
3. D(微分)項:
- D項は、誤差の変化率に比例して制御出力を補正します。急激な変化が起きたときにオーバーシュートを抑制するのに役立ちます。
ブラシレスDCモータ速度調整におけるPID制御の利点:
- 応答性:PID制御は速やかに目標速度に収束します。
- 安定性:P、I、Dの要素が組み合わさることで、安定した制御が可能となります。
- 精度:PID制御は、目標速度に正確に収束するように調整できます。
- 柔軟性:P、I、Dゲインを調整することで、異なるモータや環境に適応できます。
PID制御アルゴリズムは、ブラシレスDCモータの速度調整に広く使用されており、効果的なモータ制御を実現するための強力なツールとなっています。
PID制御アルゴリズムの概要:
PID制御は、モータの速度を目標値に維持するために使用されるフィードバック制御アルゴリズムです。PID制御は、以下の3つのコンポーネントから構成されます:

「写真の由来:24V 3500RPM 0.47Nm 172W 10.4A Ф57x69mm ブラシレスDCモータ(BLDC)」
1. P(比例)項:
- P項は、目標速度と現在の速度の誤差に比例して制御出力を生成します。誤差が大きいほど出力も大きくなります。
2. I(積分)項:
- I項は、過去の誤差の積算値に比例して制御出力を調整します。積分項は、定常状態での誤差を取り除くのに役立ちます。

「写真の由来:24V 5000RPM 0.019Nm 10W 0.75A 円形 Ф36x40mm ブラシレスDCモータ(BLDC)」
3. D(微分)項:
- D項は、誤差の変化率に比例して制御出力を補正します。急激な変化が起きたときにオーバーシュートを抑制するのに役立ちます。
ブラシレスDCモータ速度調整におけるPID制御の利点:
- 応答性:PID制御は速やかに目標速度に収束します。
- 安定性:P、I、Dの要素が組み合わさることで、安定した制御が可能となります。
- 精度:PID制御は、目標速度に正確に収束するように調整できます。
- 柔軟性:P、I、Dゲインを調整することで、異なるモータや環境に適応できます。
PID制御アルゴリズムは、ブラシレスDCモータの速度調整に広く使用されており、効果的なモータ制御を実現するための強力なツールとなっています。
Posted by emma at
16:52
│Comments(0)
2024年08月12日
PM型ステッピングモータのステップ角はどのように決まるのですか?
PM型ステッピングモーターのステップ角は、一般的に以下の要素によって決まります:
1. 歯数
2. 極数
歯数
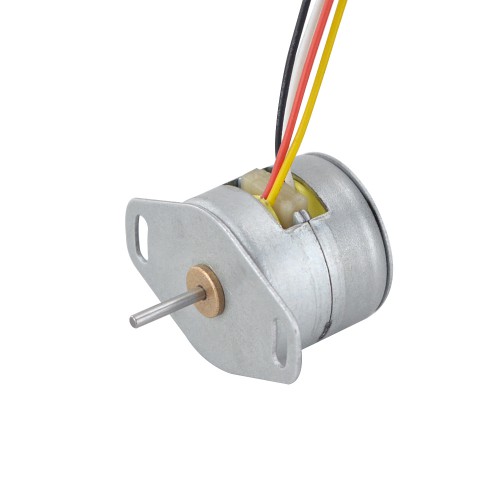
PM型ステッピングモーターのステップ角は、主に歯数によって決まります。ステッピングモーターの回転子にある歯の数がステップ角と直接関係しています。1つの電気的なパルスが印加されると、回転子が次の歯に進むことで1ステップ進むように設計されています。したがって、回転子の歯数が多いほど、1ステップの角度は小さくなります。

「写真の由来:Φ20x18.2mm PM型ステッピングモーター 18度 5.88mN.m (0.833oz.in) 0.5A 4ワイヤー」
極数
ステッピングモーターの極数もステップ角に影響を与えます。極数はステーター(定子)およびローター(回転子)の磁極数を指します。一般的に、ステッピングモーターのステップ角は極数によって決まります。ステーターとローターの磁極数が異なる場合、ステップ角は変化します。

「写真の由来:Φ42x38mm PM型ステッピングモーター ギヤ比50:1 平行軸ギアボックス付」
ステップ角は通常以下のように計算されます:
ステップ角=360/歯数×極数
PM型ステッピングモーターのステップ角は、歯数と極数の組み合わせによって決まるため、これらの要素を適切に調整することで、モーターの性能や動作を設計することが可能です。
1. 歯数
2. 極数
歯数
PM型ステッピングモーターのステップ角は、主に歯数によって決まります。ステッピングモーターの回転子にある歯の数がステップ角と直接関係しています。1つの電気的なパルスが印加されると、回転子が次の歯に進むことで1ステップ進むように設計されています。したがって、回転子の歯数が多いほど、1ステップの角度は小さくなります。
「写真の由来:Φ20x18.2mm PM型ステッピングモーター 18度 5.88mN.m (0.833oz.in) 0.5A 4ワイヤー」
極数
ステッピングモーターの極数もステップ角に影響を与えます。極数はステーター(定子)およびローター(回転子)の磁極数を指します。一般的に、ステッピングモーターのステップ角は極数によって決まります。ステーターとローターの磁極数が異なる場合、ステップ角は変化します。

「写真の由来:Φ42x38mm PM型ステッピングモーター ギヤ比50:1 平行軸ギアボックス付」
ステップ角は通常以下のように計算されます:
ステップ角=360/歯数×極数
PM型ステッピングモーターのステップ角は、歯数と極数の組み合わせによって決まるため、これらの要素を適切に調整することで、モーターの性能や動作を設計することが可能です。
Posted by emma at
14:51
│Comments(0)
2024年08月05日
バイポーラステッピングモータのステップ角は、電流の方向を制御することでどのように調整されますか?
バイポーラステッピングモータのステップ角は、電流の方向を制御することで調整されます。バイポーラステッピングモータは、2つのコイルを持ち、それぞれに電流を流すことでステップ運動を実現します。これらのコイルは通常、クロスオーバー接続(cross-over connection)またはハイブリッド接続(hybrid connection)と呼ばれる方法で接続されます。
バイポーラステッピングモータのステップ角を調整するためには、次のような手順が一般的に行われます:

「写真の由来:Nema 17 バイポーラステッピングモーター 1.8°26Ncm (36.8oz.in) 0.4A 12V 42x42x34mm 4 ワイヤー」
1. 正しい電流の方向を流す:
- バイポーラステッピングモータは、コイルに電流を流すことで磁場を生成し、モータを回転させます。ステップ角を調整するためには、正しい順方向または逆方向に電流を流す必要があります。
2. 適切なタイミングで電流を切り替える:
- バイポーラステッピングモータは、正確なタイミングでコイルの電流を切り替えることでステップ運動を生成します。ステップ角を調整するには、電流の切り替えタイミングを制御することが重要です。

「写真の由来:Nema 17 バイポーラステッピングモータ 0.9°46Ncm (65.1oz.in) 2A 2.8V 42x42x48mm 4 ワイヤー」
3. マイクロステップ制御:
- バイポーラステッピングモータでは、マイクロステップ制御が使用されることがあります。マイクロステップ制御は、1つのステップを複数の微小ステップに分割することで、スムーズな運動や高分解能の位置制御を実現します。電流の方向を微調整することで、ステップ角を調整することができます。
バイポーラステッピングモータは、電流の方向とタイミングを制御することでステップ角を調整することができます。この制御は、精密な位置決めや運動制御が必要なアプリケーションで重要な役割を果たします。
バイポーラステッピングモータのステップ角を調整するためには、次のような手順が一般的に行われます:

「写真の由来:Nema 17 バイポーラステッピングモーター 1.8°26Ncm (36.8oz.in) 0.4A 12V 42x42x34mm 4 ワイヤー」
1. 正しい電流の方向を流す:
- バイポーラステッピングモータは、コイルに電流を流すことで磁場を生成し、モータを回転させます。ステップ角を調整するためには、正しい順方向または逆方向に電流を流す必要があります。
2. 適切なタイミングで電流を切り替える:
- バイポーラステッピングモータは、正確なタイミングでコイルの電流を切り替えることでステップ運動を生成します。ステップ角を調整するには、電流の切り替えタイミングを制御することが重要です。

「写真の由来:Nema 17 バイポーラステッピングモータ 0.9°46Ncm (65.1oz.in) 2A 2.8V 42x42x48mm 4 ワイヤー」
3. マイクロステップ制御:
- バイポーラステッピングモータでは、マイクロステップ制御が使用されることがあります。マイクロステップ制御は、1つのステップを複数の微小ステップに分割することで、スムーズな運動や高分解能の位置制御を実現します。電流の方向を微調整することで、ステップ角を調整することができます。
バイポーラステッピングモータは、電流の方向とタイミングを制御することでステップ角を調整することができます。この制御は、精密な位置決めや運動制御が必要なアプリケーションで重要な役割を果たします。