2024年01月24日
モータドライバはどんな部分で構造されていますか?
モータドライバは、主に以下の部分で構成されています:
パワーモスフェットまたはパワートランジスタ:モータドライバの主要な部品であり、モーターに電力を供給する役割を果たします。パワーモスフェットまたはパワートランジスタは、高電流および高電圧を制御するために設計されています。
制御回路:モータドライバには、モーターの回転方向や速度を制御する回路が含まれています。これには、PWM(パルス幅変調)信号を生成するための制御ICやマイクロコントローラが含まれることがあります。

「写真の由来:Leadshine デジタルステッピングドライバ 3DM580S 20-74VDC 0.5-8.0A (3相 Nema 17、23、24、34ステップモーターに適合)」
電流検出回路:モータドライバは、モーターへの電流を監視するための電流検出回路を備えています。これにより、過電流や短絡などの異常を検出し、保護機能を実行することができます。
保護回路:モータドライバは、モーターやドライバ自体を保護するためのさまざまな保護回路を備えています。これには、過電流保護、過熱保護、過電圧保護、低電圧保護などが含まれます。
インターフェース回路:モータドライバは、外部からの制御信号を受け付けるためのインターフェース回路を備えています。一般的なインターフェースには、PWM信号、デジタル入力、アナログ入力、シリアル通信(SPIやI2C)などがあります。

「写真の由来:ステッピングモータドライバー 2.4-7.2A 最大 80VAC或いは110VDC」
電源回路:モータドライバは、適切な電源電圧を供給するための電源回路を備えています。これには、電源フィルタリング、電圧レギュレーション、電源保護回路などが含まれます。
これらの部分が組み合わさって、モータドライバはモーターの制御と保護を行います。モータドライバの具体的な構造や機能は、製品の種類や応用によって異なる場合があります。
パワーモスフェットまたはパワートランジスタ:モータドライバの主要な部品であり、モーターに電力を供給する役割を果たします。パワーモスフェットまたはパワートランジスタは、高電流および高電圧を制御するために設計されています。
制御回路:モータドライバには、モーターの回転方向や速度を制御する回路が含まれています。これには、PWM(パルス幅変調)信号を生成するための制御ICやマイクロコントローラが含まれることがあります。

「写真の由来:Leadshine デジタルステッピングドライバ 3DM580S 20-74VDC 0.5-8.0A (3相 Nema 17、23、24、34ステップモーターに適合)」
電流検出回路:モータドライバは、モーターへの電流を監視するための電流検出回路を備えています。これにより、過電流や短絡などの異常を検出し、保護機能を実行することができます。
保護回路:モータドライバは、モーターやドライバ自体を保護するためのさまざまな保護回路を備えています。これには、過電流保護、過熱保護、過電圧保護、低電圧保護などが含まれます。
インターフェース回路:モータドライバは、外部からの制御信号を受け付けるためのインターフェース回路を備えています。一般的なインターフェースには、PWM信号、デジタル入力、アナログ入力、シリアル通信(SPIやI2C)などがあります。

「写真の由来:ステッピングモータドライバー 2.4-7.2A 最大 80VAC或いは110VDC」
電源回路:モータドライバは、適切な電源電圧を供給するための電源回路を備えています。これには、電源フィルタリング、電圧レギュレーション、電源保護回路などが含まれます。
これらの部分が組み合わさって、モータドライバはモーターの制御と保護を行います。モータドライバの具体的な構造や機能は、製品の種類や応用によって異なる場合があります。
Posted by emma at
16:22
│Comments(0)
2024年01月18日
リニアステッピングモータとは何?その特徴は?
リニアステッピングモータ(Linear Stepping Motor)は、ステッピングモータの一種であり、回転運動ではなく直線運動を実現するために設計されたモータです。以下に、リニアステッピングモータの主な特徴を説明します。
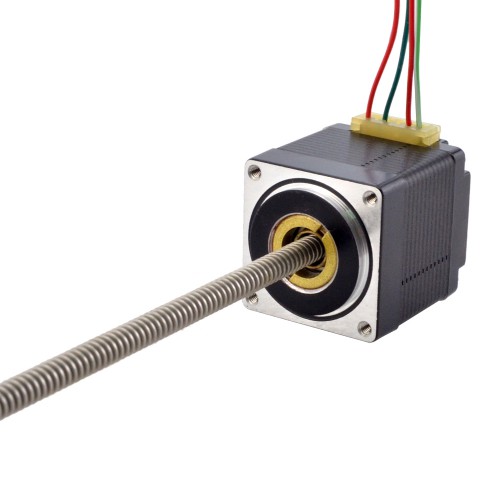
直線運動: リニアステッピングモータは、回転運動ではなく直線運動を提供します。これにより、直線的な移動や位置制御が必要なアプリケーションに適しています。例えば、印刷業界の印刷ヘッドの移動や産業用機械の精密な位置決めなどに使用されます。

「写真の由来:NEMA 11 ノンキャプティブリニアステッピングモータ 11N13S1004FD5-200RS 1.0A 0.06Nm ねじリード4.877mm/0.192" 長さ150mm」
ステップモーション: リニアステッピングモータは、ステップモーションと呼ばれる連続したステップ動作を通じて移動します。各ステップは、モータのコイルにパルス信号を送ることで発生し、特定の距離を移動します。このステップモーションにより、精密な位置決めと制御が可能になります。
高分解能と正確性: リニアステッピングモータは、ステップ角度やピッチに基づいて位置が制御されるため、高い分解能と正確性を実現します。ステップ角度が小さいほど、より細かい位置制御が可能です。このため、微細な移動や高精度な位置決めが求められるアプリケーションに適しています。

「写真の由来:NEMA 11 キャプティブリニアステッピングモータ 1.0A 11C18S1004GD5-025RS 0.1Nm ねじリード2.54mm(0.1") 長さ 25.4mm」
高トルク: リニアステッピングモータは、高いトルクを発生することができます。各ステップにおいて安定したトルクを提供し、負荷に対して安定した力を発揮します。この特性により、リニアステッピングモータは垂直方向の負荷や抵抗に対しても効果的に動作します。
高い応答性とダイレクトドライブ: リニアステッピングモータは、パルス信号に応答して即座に移動することができます。また、リニアガイドやベルトなどのトランスミッション部品を介さず、負荷を直接駆動することができるため、応答性と効率性が高いと言えます。
これらの特徴により、リニアステッピングモータは、直線運動や位置制御が必要なアプリケーションに広く使用されます。例としては、3Dプリンター、医療機器、ロボット工学、自動化装置などがあります。
直線運動: リニアステッピングモータは、回転運動ではなく直線運動を提供します。これにより、直線的な移動や位置制御が必要なアプリケーションに適しています。例えば、印刷業界の印刷ヘッドの移動や産業用機械の精密な位置決めなどに使用されます。
「写真の由来:NEMA 11 ノンキャプティブリニアステッピングモータ 11N13S1004FD5-200RS 1.0A 0.06Nm ねじリード4.877mm/0.192" 長さ150mm」
ステップモーション: リニアステッピングモータは、ステップモーションと呼ばれる連続したステップ動作を通じて移動します。各ステップは、モータのコイルにパルス信号を送ることで発生し、特定の距離を移動します。このステップモーションにより、精密な位置決めと制御が可能になります。
高分解能と正確性: リニアステッピングモータは、ステップ角度やピッチに基づいて位置が制御されるため、高い分解能と正確性を実現します。ステップ角度が小さいほど、より細かい位置制御が可能です。このため、微細な移動や高精度な位置決めが求められるアプリケーションに適しています。

「写真の由来:NEMA 11 キャプティブリニアステッピングモータ 1.0A 11C18S1004GD5-025RS 0.1Nm ねじリード2.54mm(0.1") 長さ 25.4mm」
高トルク: リニアステッピングモータは、高いトルクを発生することができます。各ステップにおいて安定したトルクを提供し、負荷に対して安定した力を発揮します。この特性により、リニアステッピングモータは垂直方向の負荷や抵抗に対しても効果的に動作します。
高い応答性とダイレクトドライブ: リニアステッピングモータは、パルス信号に応答して即座に移動することができます。また、リニアガイドやベルトなどのトランスミッション部品を介さず、負荷を直接駆動することができるため、応答性と効率性が高いと言えます。
これらの特徴により、リニアステッピングモータは、直線運動や位置制御が必要なアプリケーションに広く使用されます。例としては、3Dプリンター、医療機器、ロボット工学、自動化装置などがあります。
Posted by emma at
15:41
│Comments(0)
2024年01月10日
中空ステッピングモータは何ができますか?
中空ステッピングモーターは、ステッピングモーターの一種であり、中空の回転軸を持つ特殊な設計のモーターです。中空ステッピングモーターは、その中心部にシャフトやワイヤー、パイプなどが通過できるようになっており、これによりさまざまなアプリケーションで特別な機能を提供します。以下に、中空ステッピングモーターの主な機能と利用例をいくつか挙げます。
内部配線やパイプの通過: 中空ステッピングモーターの中心部には、シャフトやワイヤー、パイプなどを通過させることができます。これにより、モーターの回転軸を通じて信号線やケーブル、冷却水などを伝送することができます。例えば、ロボットアームや回転テーブルなどのアプリケーションで、内部配線や冷却液の供給を効率的に行うことができます。

「写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 16Ncm (22.66oz.in) 1.25A 35x35x35mm」
パッケージングや設計の軽量化: 中空ステッピングモーターは、中心部が空洞であるため、モーター自体の重量や大きさを軽減することができます。これにより、機械や装置の設計において、重量やスペースの制約がある場合でも効果的に利用できます。
ロータリージョイントの実現: 中空ステッピングモーターは、回転軸を通じて内部の部品やデバイスと連結することができます。これにより、回転軸を介して機械的な連結や電気信号の伝達を行うことができます。例えば、カメラやセンサーを回転軸に取り付け、連続した回転運動中に信号や映像を伝えることができます。

「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 1.45 Nm(205.38oz.in) 2.0A 57x57x65mm」
パン・チルト機構: 中空ステッピングモーターを使用して、パン・チルト機構を実現することができます。パン・チルト機構は、カメラやセンサーなどのデバイスを水平方向と垂直方向に回転・傾斜させる機能を指します。これにより、監視カメラや航空写真撮影などで広範囲の視野をカバーすることができます。
中空ステッピングモーターは、さまざまなアプリケーションで特殊な機能を提供するため、産業用ロボット、カメラシステム、医療機器、半導体製造装置など、幅広い分野で使用されています。
内部配線やパイプの通過: 中空ステッピングモーターの中心部には、シャフトやワイヤー、パイプなどを通過させることができます。これにより、モーターの回転軸を通じて信号線やケーブル、冷却水などを伝送することができます。例えば、ロボットアームや回転テーブルなどのアプリケーションで、内部配線や冷却液の供給を効率的に行うことができます。

「写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 16Ncm (22.66oz.in) 1.25A 35x35x35mm」
パッケージングや設計の軽量化: 中空ステッピングモーターは、中心部が空洞であるため、モーター自体の重量や大きさを軽減することができます。これにより、機械や装置の設計において、重量やスペースの制約がある場合でも効果的に利用できます。
ロータリージョイントの実現: 中空ステッピングモーターは、回転軸を通じて内部の部品やデバイスと連結することができます。これにより、回転軸を介して機械的な連結や電気信号の伝達を行うことができます。例えば、カメラやセンサーを回転軸に取り付け、連続した回転運動中に信号や映像を伝えることができます。

「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 1.45 Nm(205.38oz.in) 2.0A 57x57x65mm」
パン・チルト機構: 中空ステッピングモーターを使用して、パン・チルト機構を実現することができます。パン・チルト機構は、カメラやセンサーなどのデバイスを水平方向と垂直方向に回転・傾斜させる機能を指します。これにより、監視カメラや航空写真撮影などで広範囲の視野をカバーすることができます。
中空ステッピングモーターは、さまざまなアプリケーションで特殊な機能を提供するため、産業用ロボット、カメラシステム、医療機器、半導体製造装置など、幅広い分野で使用されています。
Posted by emma at
15:46
│Comments(0)
2024年01月04日
ユニポーラステッピングモータの配線について
ユニポーラステッピングモータの配線方法は、モータのタイプやドライバの接続方式によって異なる場合があります。以下では、一般的なユニポーラステッピングモータの配線方法について説明します。
ユニポーラステッピングモータは、通常、4つの線(A+、A-、B+、B-)で構成されています。これらの線を適切に接続することで、モータを制御します。

「写真の由来:Nema 23 ユニポーラステッピングモータ 1.8°90Ncm (127.5oz.in) 1A 7.4V 57x57x56mm 6 ワイヤー」
以下に、ユニポーラステッピングモータの配線の一般的な方法を示します。
モータの線の識別: モータの線を識別するために、マルチメーターやモータの仕様書を使用して、各線の正しい識別子(A+、A-、B+、B-)を確認します。
ドライバの接続: ユニポーラステッピングモータを制御するためには、適切なドライバが必要です。ドライバには、各モータ線を接続するための端子があります。一般的なドライバでは、A+、A-、B+、B-の4つの端子が用意されています。
モータの線とドライバの接続: モータの線とドライバの接続を行います。一般的な接続方法は以下の通りです。
A+線をドライバのA+端子に接続します。
A-線をドライバのA-端子に接続します。
B+線をドライバのB+端子に接続します。
B-線をドライバのB-端子に接続します。
電源の接続: ドライバには、電源を供給する必要があります。ドライバの電源端子に正しい電圧(仕様に基づいた電源電圧)を接続します。また、GND端子と共通の接地点にも接続します。

「写真の由来:Nema 17 ユニポーラステッピングモータ 1.8°65Ncm (92oz.in) 1.2A 7.2V 42x42x60mm 6 ワイヤー」
制御信号の接続: ドライバは、制御信号を受け取ることでモータを制御します。制御信号は、マイクロコントローラやステップパルスジェネレータから供給されます。ドライバの制御端子に対応する制御信号を接続します。一般的な接続は、パルス信号(ステップ信号)をSTEP端子に接続し、方向信号(回転方向)をDIR端子に接続する方法です。
以上が一般的なユニポーラステッピングモータの配線方法です。ただし、モータやドライバの仕様によっては、接続方法が異なる場合があります。モータとドライバの仕様書やマニュアルを参照し、正確な配線手順を確認することをおすすめします。また、電源や制御信号の接続においては、適切な電圧や極性を守るように注意してください。
ユニポーラステッピングモータは、通常、4つの線(A+、A-、B+、B-)で構成されています。これらの線を適切に接続することで、モータを制御します。

「写真の由来:Nema 23 ユニポーラステッピングモータ 1.8°90Ncm (127.5oz.in) 1A 7.4V 57x57x56mm 6 ワイヤー」
以下に、ユニポーラステッピングモータの配線の一般的な方法を示します。
モータの線の識別: モータの線を識別するために、マルチメーターやモータの仕様書を使用して、各線の正しい識別子(A+、A-、B+、B-)を確認します。
ドライバの接続: ユニポーラステッピングモータを制御するためには、適切なドライバが必要です。ドライバには、各モータ線を接続するための端子があります。一般的なドライバでは、A+、A-、B+、B-の4つの端子が用意されています。
モータの線とドライバの接続: モータの線とドライバの接続を行います。一般的な接続方法は以下の通りです。
A+線をドライバのA+端子に接続します。
A-線をドライバのA-端子に接続します。
B+線をドライバのB+端子に接続します。
B-線をドライバのB-端子に接続します。
電源の接続: ドライバには、電源を供給する必要があります。ドライバの電源端子に正しい電圧(仕様に基づいた電源電圧)を接続します。また、GND端子と共通の接地点にも接続します。

「写真の由来:Nema 17 ユニポーラステッピングモータ 1.8°65Ncm (92oz.in) 1.2A 7.2V 42x42x60mm 6 ワイヤー」
制御信号の接続: ドライバは、制御信号を受け取ることでモータを制御します。制御信号は、マイクロコントローラやステップパルスジェネレータから供給されます。ドライバの制御端子に対応する制御信号を接続します。一般的な接続は、パルス信号(ステップ信号)をSTEP端子に接続し、方向信号(回転方向)をDIR端子に接続する方法です。
以上が一般的なユニポーラステッピングモータの配線方法です。ただし、モータやドライバの仕様によっては、接続方法が異なる場合があります。モータとドライバの仕様書やマニュアルを参照し、正確な配線手順を確認することをおすすめします。また、電源や制御信号の接続においては、適切な電圧や極性を守るように注意してください。
Posted by emma at
15:29
│Comments(0)