2024年03月29日
ギヤードモータの配線方法
ギヤードモータの配線方法は、具体的なモータのタイプや制御システムによって異なります。以下に一般的なギヤードモータの配線方法の一例を示しますが、注意点として、安全性と機器の仕様に従うことが非常に重要です。必ずモータの取扱説明書やメーカーのガイドラインを参照し、専門家の指導を受けることをおすすめします。
1. 電源供給: ギヤードモータには電源が必要です。モータの仕様に基づいて、適切な電源電圧と周波数を確認し、電源供給を行います。一般的にはAC電源またはDC電源が使用されます。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=33mmとギヤ比5:1遊星ギアボックス」
2. 制御信号の配線: ギヤードモータを制御するためには、制御信号をモータに配線する必要があります。制御信号は、回転方向や回転速度などを制御するための信号です。
- ステップモータの場合: ステップモータはパルス信号を使用して制御されます。一般的に、パルス信号はパルスジェネレータやマイクロコントローラから供給されます。ステップモータは複数のコイルを持つため、それぞれのコイルに対応するパルス信号線が必要です。
- DCモータの場合: DCモータは通常、回転方向と速度を制御するための制御信号を使用します。制御信号は、モータドライバや回路に接続され、適切な信号レベルや制御方式に従って配線されます。

「写真の由来:Nema 11 ステッピングモーターバイポーラ L=51mmとギヤ比27:1遊星ギアボックス」
3. 電源とモータの接続: 電源とギヤードモータを接続するためには、適切な電源線や配線方法を使用する必要があります。接続方法は、モータの仕様や使用する電源によって異なります。
- ACモータの場合: ACモータは通常、専用の接続端子や配線方法を持っています。電源供給とモータの接続には、モータの仕様に従ったケーブルや端子ブロックを使用します。
- DCモータの場合: DCモータは一般的に2本の電源線(正極と負極)を持ちます。電源供給とモータの接続には、適切なケーブルやコネクタを使用して接続します。
注意:モータの配線前には、電源を切り、安全対策を講じることを忘れないでください。また、モータの仕様や制御システムの要件に従って適切な配線を行う必要があります。不適切な配線は機器の故障や安全上の問題を引き起こす可能性があるため、注意が必要です。
1. 電源供給: ギヤードモータには電源が必要です。モータの仕様に基づいて、適切な電源電圧と周波数を確認し、電源供給を行います。一般的にはAC電源またはDC電源が使用されます。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=33mmとギヤ比5:1遊星ギアボックス」
2. 制御信号の配線: ギヤードモータを制御するためには、制御信号をモータに配線する必要があります。制御信号は、回転方向や回転速度などを制御するための信号です。
- ステップモータの場合: ステップモータはパルス信号を使用して制御されます。一般的に、パルス信号はパルスジェネレータやマイクロコントローラから供給されます。ステップモータは複数のコイルを持つため、それぞれのコイルに対応するパルス信号線が必要です。
- DCモータの場合: DCモータは通常、回転方向と速度を制御するための制御信号を使用します。制御信号は、モータドライバや回路に接続され、適切な信号レベルや制御方式に従って配線されます。
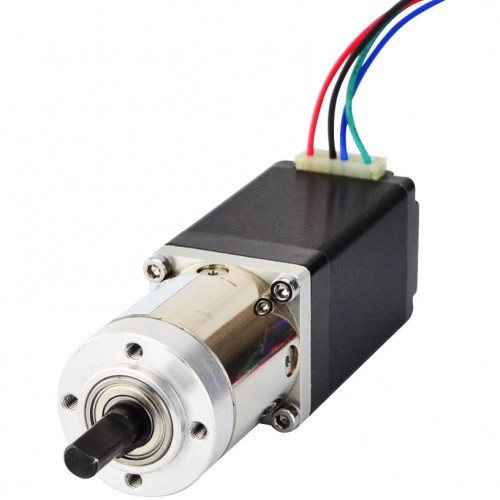
「写真の由来:Nema 11 ステッピングモーターバイポーラ L=51mmとギヤ比27:1遊星ギアボックス」
3. 電源とモータの接続: 電源とギヤードモータを接続するためには、適切な電源線や配線方法を使用する必要があります。接続方法は、モータの仕様や使用する電源によって異なります。
- ACモータの場合: ACモータは通常、専用の接続端子や配線方法を持っています。電源供給とモータの接続には、モータの仕様に従ったケーブルや端子ブロックを使用します。
- DCモータの場合: DCモータは一般的に2本の電源線(正極と負極)を持ちます。電源供給とモータの接続には、適切なケーブルやコネクタを使用して接続します。
注意:モータの配線前には、電源を切り、安全対策を講じることを忘れないでください。また、モータの仕様や制御システムの要件に従って適切な配線を行う必要があります。不適切な配線は機器の故障や安全上の問題を引き起こす可能性があるため、注意が必要です。
Posted by emma at
15:41
│Comments(0)
2024年03月21日
ステッピングモーターの精度は、その応用結果にどのような影響を与えますか?
ステッピングモーターの精度は、その応用結果に以下のような影響を与えます。
位置制御精度: ステッピングモーターは、一定のステップ角で回転する特性を持っています。精度の高いステッピングモーターは、正確な位置制御が可能であり、所望の位置に対して高い精度で移動することができます。逆に、精度が低いステッピングモーターは、位置のずれや不正確な移動が生じる可能性があります。

「写真の由来:Nema 14 バイポーラステッピングモーター 0.9°11Ncm (15.58oz.in) 0.4A 10V 35x35x28mm 4 ワイヤー」
トルク特性: ステッピングモーターのトルク特性は、応用結果に大きな影響を与えます。高精度なステッピングモーターは、所望のトルクを正確に発生させることができます。これにより、負荷の変動や外部の干渉に対しても安定したトルクを維持し、応用の正確性と信頼性が向上します。
加速および減速のスムーズさ: ステッピングモーターの精度は、加速や減速時のスムーズな動作にも関連します。精度の高いステッピングモーターは、正確なステップ角を提供するため、滑らかな加速および減速が可能となります。これにより、機械の振動やショックを最小限に抑え、応用の安定性と快適性を向上させることができます。

「写真の由来:Nema 23 集積式ステッピングモータ ドライバ付 126 Ncm(178.4oz.in) ISD04 12-38VDC」
レピート精度: ステッピングモーターの精度は、同じ位置や動作を繰り返す場合のレピート精度にも影響を与えます。高精度なステッピングモーターは、繰り返し動作においても一貫性のある結果を提供します。これは、自動化プロセスや精密な位置決めが必要な応用において重要です。
以上のように、ステッピングモーターの精度は、位置制御精度、トルク特性、加速・減速のスムーズさ、およびレピート精度など、応用結果に直接影響を与える要素です。適切な精度のステッピングモーターを選択することは、機械や装置の性能、信頼性、および品質向上に寄与します。
位置制御精度: ステッピングモーターは、一定のステップ角で回転する特性を持っています。精度の高いステッピングモーターは、正確な位置制御が可能であり、所望の位置に対して高い精度で移動することができます。逆に、精度が低いステッピングモーターは、位置のずれや不正確な移動が生じる可能性があります。

「写真の由来:Nema 14 バイポーラステッピングモーター 0.9°11Ncm (15.58oz.in) 0.4A 10V 35x35x28mm 4 ワイヤー」
トルク特性: ステッピングモーターのトルク特性は、応用結果に大きな影響を与えます。高精度なステッピングモーターは、所望のトルクを正確に発生させることができます。これにより、負荷の変動や外部の干渉に対しても安定したトルクを維持し、応用の正確性と信頼性が向上します。
加速および減速のスムーズさ: ステッピングモーターの精度は、加速や減速時のスムーズな動作にも関連します。精度の高いステッピングモーターは、正確なステップ角を提供するため、滑らかな加速および減速が可能となります。これにより、機械の振動やショックを最小限に抑え、応用の安定性と快適性を向上させることができます。

「写真の由来:Nema 23 集積式ステッピングモータ ドライバ付 126 Ncm(178.4oz.in) ISD04 12-38VDC」
レピート精度: ステッピングモーターの精度は、同じ位置や動作を繰り返す場合のレピート精度にも影響を与えます。高精度なステッピングモーターは、繰り返し動作においても一貫性のある結果を提供します。これは、自動化プロセスや精密な位置決めが必要な応用において重要です。
以上のように、ステッピングモーターの精度は、位置制御精度、トルク特性、加速・減速のスムーズさ、およびレピート精度など、応用結果に直接影響を与える要素です。適切な精度のステッピングモーターを選択することは、機械や装置の性能、信頼性、および品質向上に寄与します。
Posted by emma at
16:25
│Comments(0)
2024年03月15日
ハイブリッドステッピングモーターの性能パラメータ分析
ハイブリッドステッピングモーターの性能パラメータを分析するためには、以下のようなパラメータを考慮する必要があります。
ステップ角度(Step Angle): ステッピングモーターは、一定の角度(ステップ角度)ごとに回転するモーターです。ステップ角度は、1ステップあたりの回転角度を表し、一般的に1.8度(200ステップ/回転)や0.9度(400ステップ/回転)がよく使用されます。ステップ角度は、モーターの位置決めの精度に影響を与えます。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
ホールドトルク(Holding Torque): ホールドトルクは、ステッピングモーターが静止状態で保持できる最大トルクのことです。モーターのトルクは、負荷に対して十分な力を発揮できるかどうかを示す重要なパラメータです。ホールドトルクは、モーターのサイズや設計によって異なります。
ダイナミックトルク(Dynamic Torque): ダイナミックトルクは、ステッピングモーターが回転中に発揮できる最大トルクのことです。ステッピングモーターは、パルス信号を入力することでステップごとに回転しますが、高速回転時にはトルクが減少する傾向があります。ダイナミックトルクは、モーターの回転速度によって異なります。

「写真の由来:デュアルシャフト Nema 23 シングル/デュアルシャフトハイブリッドステッピング モーター 2.83Nm 4A 8 ワイヤー」
応答性と加速度(Responsiveness and Acceleration): ステッピングモーターの応答性と加速度は、モーターが入力信号に対してどれだけ素早く応答し、回転を開始・停止できるかを示します。これは、モーターの制御回路やドライバーの性能によって影響を受けます。高い応答性と加速度は、位置決めや動作の精度向上に寄与します。
分解能(Resolution): 分解能は、ステッピングモーターが1ステップごとに移動できる最小単位のことです。分解能は、ステップ角度やドライバーの設定によって決まります。高い分解能は、モーターの位置決めの正確性を向上させます。
これらのパラメータは、ステッピングモーターの性能と応用に大きな影響を与えます。モーターの仕様書や製造元のデータシートを参照することで、ハイブリッドステッピングモーターの具体的な性能パラメータを詳細に分析することができます。また、モーターの選択や設計においては、応用の要件や目標に基づいてこれらのパラメータを適切に評価することが重要です。
ステップ角度(Step Angle): ステッピングモーターは、一定の角度(ステップ角度)ごとに回転するモーターです。ステップ角度は、1ステップあたりの回転角度を表し、一般的に1.8度(200ステップ/回転)や0.9度(400ステップ/回転)がよく使用されます。ステップ角度は、モーターの位置決めの精度に影響を与えます。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
ホールドトルク(Holding Torque): ホールドトルクは、ステッピングモーターが静止状態で保持できる最大トルクのことです。モーターのトルクは、負荷に対して十分な力を発揮できるかどうかを示す重要なパラメータです。ホールドトルクは、モーターのサイズや設計によって異なります。
ダイナミックトルク(Dynamic Torque): ダイナミックトルクは、ステッピングモーターが回転中に発揮できる最大トルクのことです。ステッピングモーターは、パルス信号を入力することでステップごとに回転しますが、高速回転時にはトルクが減少する傾向があります。ダイナミックトルクは、モーターの回転速度によって異なります。

「写真の由来:デュアルシャフト Nema 23 シングル/デュアルシャフトハイブリッドステッピング モーター 2.83Nm 4A 8 ワイヤー」
応答性と加速度(Responsiveness and Acceleration): ステッピングモーターの応答性と加速度は、モーターが入力信号に対してどれだけ素早く応答し、回転を開始・停止できるかを示します。これは、モーターの制御回路やドライバーの性能によって影響を受けます。高い応答性と加速度は、位置決めや動作の精度向上に寄与します。
分解能(Resolution): 分解能は、ステッピングモーターが1ステップごとに移動できる最小単位のことです。分解能は、ステップ角度やドライバーの設定によって決まります。高い分解能は、モーターの位置決めの正確性を向上させます。
これらのパラメータは、ステッピングモーターの性能と応用に大きな影響を与えます。モーターの仕様書や製造元のデータシートを参照することで、ハイブリッドステッピングモーターの具体的な性能パラメータを詳細に分析することができます。また、モーターの選択や設計においては、応用の要件や目標に基づいてこれらのパラメータを適切に評価することが重要です。
Posted by emma at
15:23
│Comments(0)
2024年03月07日
スピンドルモーターの取り付けとメンテナンス方法
スピンドルモーターの取り付けとメンテナンス方法は、特定のモーターのタイプやメーカーによって異なる場合があります。以下は一般的な手順と注意点ですが、モーターの取り扱いに関する具体的な指示やメーカーの推奨事項に従うことが重要です。
取り付け手順:
モーターの適切な位置と方向を確認し、設置する場所に合わせて適切な取り付け方法を選択します。一般的な方法には、ボルトやネジによる取り付け、モーターマウントを使用した固定などがあります。

「写真の由来:CNC空冷スピンドルモーター220V 1.5KW 24000RPM 400Hz ER11コレット CNCインバータ(VFD)モーター2」
取り付ける前に、取り付け面が平らであることを確認し、必要に応じて表面を整えます。また、モーターと取り付け面の間に適切な絶縁材料や振動吸収材料を使用することも検討してください。
電気接続:
モーターの電源と制御信号を適切に接続します。電力供給の仕様に従い、正しい電源ケーブルやコネクタを使用します。制御信号は、モーターの回転速度や方向を制御するための信号線やプロトコルに接続される場合があります。
メンテナンス方法:
定期的な点検と清掃: スピンドルモーターを定期的に点検し、異常や摩耗の兆候を確認します。モーター周辺のゴミや異物を取り除き、清掃します。特に、冷却ファンやフィルターの清掃が重要です。
潤滑: スピンドルモーターには潤滑が必要な場合があります。メーカーの推奨に従って、適切な潤滑剤を使用し、定期的に潤滑を行います。潤滑剤の種類や交換頻度については、モーターの仕様書やメーカーの指示を参照してください。

「写真の由来:CNCスクエアスピンドルモータ空冷 380V 2.2KW 18000RPM 300Hz ER25コレット」
温度管理: スピンドルモーターの温度を監視し、過熱を防ぐために必要な措置を取ります。必要に応じて冷却ファンやヒートシンクを使用し、適切な冷却を確保します。
異音や振動のチェック: モーターが異音や異常な振動を発生していないかを定期的にチェックします。異常がある場合は、原因を特定し、必要に応じて修理や交換を行います。
これらは一般的なガイドラインですので、特定のスピンドルモーターに関するメーカーの指示や推奨事項に従うことが重要です。モーターのメンテナンスには専門的な知識や技能が必要な場合がありますので、必要に応じて専門家に相談することをおすすめします。
取り付け手順:
モーターの適切な位置と方向を確認し、設置する場所に合わせて適切な取り付け方法を選択します。一般的な方法には、ボルトやネジによる取り付け、モーターマウントを使用した固定などがあります。

「写真の由来:CNC空冷スピンドルモーター220V 1.5KW 24000RPM 400Hz ER11コレット CNCインバータ(VFD)モーター2」
取り付ける前に、取り付け面が平らであることを確認し、必要に応じて表面を整えます。また、モーターと取り付け面の間に適切な絶縁材料や振動吸収材料を使用することも検討してください。
電気接続:
モーターの電源と制御信号を適切に接続します。電力供給の仕様に従い、正しい電源ケーブルやコネクタを使用します。制御信号は、モーターの回転速度や方向を制御するための信号線やプロトコルに接続される場合があります。
メンテナンス方法:
定期的な点検と清掃: スピンドルモーターを定期的に点検し、異常や摩耗の兆候を確認します。モーター周辺のゴミや異物を取り除き、清掃します。特に、冷却ファンやフィルターの清掃が重要です。
潤滑: スピンドルモーターには潤滑が必要な場合があります。メーカーの推奨に従って、適切な潤滑剤を使用し、定期的に潤滑を行います。潤滑剤の種類や交換頻度については、モーターの仕様書やメーカーの指示を参照してください。

「写真の由来:CNCスクエアスピンドルモータ空冷 380V 2.2KW 18000RPM 300Hz ER25コレット」
温度管理: スピンドルモーターの温度を監視し、過熱を防ぐために必要な措置を取ります。必要に応じて冷却ファンやヒートシンクを使用し、適切な冷却を確保します。
異音や振動のチェック: モーターが異音や異常な振動を発生していないかを定期的にチェックします。異常がある場合は、原因を特定し、必要に応じて修理や交換を行います。
これらは一般的なガイドラインですので、特定のスピンドルモーターに関するメーカーの指示や推奨事項に従うことが重要です。モーターのメンテナンスには専門的な知識や技能が必要な場合がありますので、必要に応じて専門家に相談することをおすすめします。
Posted by emma at
16:03
│Comments(0)
2024年03月01日
平行軸ギヤードモータの応用例
平行軸ギヤードモータは、平行に配置された軸とギア機構を持つモーターであり、以下にいくつかの一般的な応用例を挙げることができます。
産業機械:
平行軸ギヤードモータは、産業機械に広く使用されます。コンベヤの駆動、ポンプの駆動、粉砕機やミキサーの駆動など、様々な機械の動力源として利用されます。ギアの減速比やトルク伝達能力が高いため、重い負荷を効率的に駆動することができます。

「写真の由来:Nema 34 ステッピングモーターバイポーラ L=97mmと後軸&ギヤ比 13:1平行軸ギアボックス」
自動車産業:
平行軸ギヤードモータは、自動車の応用にも広く使用されます。例えば、ウインドウリフト機構やシート調整機構など、自動車内装の動力駆動に利用されます。また、エンジンやトランスミッションに搭載されるスターターモーターにも利用されます。
ロボット工学:
平行軸ギヤードモータは、ロボット工学においても重要な役割を果たします。ロボットの関節やアームの駆動に使用され、精密な動作や制御が可能です。また、ロボットの移動機構にも利用されることがあります。

「写真の由来:Nema 34 ステッピングモーターバイポーラ L=97mmと後軸&ギヤ比9:1平行軸ギアボックス」
医療機器:
平行軸ギヤードモータは、医療機器においても使用されます。手術用器具や検査装置など、様々な医療機器の駆動に利用されます。高いトルク伝達能力と正確な制御を提供するため、医療手術や診断において信頼性の高い動力源として選ばれています。
環境制御:
平行軸ギヤードモータは、空調システムや換気システムなどの環境制御機器に使用されることがあります。制御弁やファンの駆動など、様々なアプリケーションで利用されます。静音性や効率性が求められる場合に適しています。
これらは平行軸ギヤードモータの一般的な応用例の一部ですが、実際の応用は要件や産業によって異なる場合があります。平行軸ギヤードモータは、高いトルク伝達能力、信頼性、効率性を備えており、幅広い産業分野で利用されています。
産業機械:
平行軸ギヤードモータは、産業機械に広く使用されます。コンベヤの駆動、ポンプの駆動、粉砕機やミキサーの駆動など、様々な機械の動力源として利用されます。ギアの減速比やトルク伝達能力が高いため、重い負荷を効率的に駆動することができます。

「写真の由来:Nema 34 ステッピングモーターバイポーラ L=97mmと後軸&ギヤ比 13:1平行軸ギアボックス」
自動車産業:
平行軸ギヤードモータは、自動車の応用にも広く使用されます。例えば、ウインドウリフト機構やシート調整機構など、自動車内装の動力駆動に利用されます。また、エンジンやトランスミッションに搭載されるスターターモーターにも利用されます。
ロボット工学:
平行軸ギヤードモータは、ロボット工学においても重要な役割を果たします。ロボットの関節やアームの駆動に使用され、精密な動作や制御が可能です。また、ロボットの移動機構にも利用されることがあります。

「写真の由来:Nema 34 ステッピングモーターバイポーラ L=97mmと後軸&ギヤ比9:1平行軸ギアボックス」
医療機器:
平行軸ギヤードモータは、医療機器においても使用されます。手術用器具や検査装置など、様々な医療機器の駆動に利用されます。高いトルク伝達能力と正確な制御を提供するため、医療手術や診断において信頼性の高い動力源として選ばれています。
環境制御:
平行軸ギヤードモータは、空調システムや換気システムなどの環境制御機器に使用されることがあります。制御弁やファンの駆動など、様々なアプリケーションで利用されます。静音性や効率性が求められる場合に適しています。
これらは平行軸ギヤードモータの一般的な応用例の一部ですが、実際の応用は要件や産業によって異なる場合があります。平行軸ギヤードモータは、高いトルク伝達能力、信頼性、効率性を備えており、幅広い産業分野で利用されています。
Posted by emma at
15:25
│Comments(0)