2023年10月30日
ステッピングモータの速度をどう制御しますか?
ステッピングモータの速度を制御するためには、以下の方法が一般的に使用されます:
ステップパルス周波数の変更: ステッピングモータは、ステップパルスと呼ばれる信号パルスを受け取り、そのパルスの周波数に応じて回転します。ステップパルスの周波数を変更することで、モータの速度を制御できます。一般的には、ステップパルス周波数を上げると速度が上がり、下げると速度が下がります。

「写真の由来:Sシリーズ 34バイポーラステッピングモーター 34HS45-6004S 1.8°8.2Nm 86x86x114mm 4ワイヤー」
マイクロステップ駆動: ステッピングモータは通常、1ステップごとに固定の角度で回転しますが、マイクロステップ駆動を使用することで、より細かな角度で回転させることができます。マイクロステップ駆動では、ステップパルスをより小さな角度に分割し、モータを滑らかに制御します。より小さな角度での駆動により、速度の微調整が可能となります。
加減速制御: ステッピングモータの速度を制御する際には、加速および減速のフェーズを設定することが一般的です。モータを急激に最高速度に達せずに動かすために、ソフトウェア上でステップパルス周波数を徐々に上げたり下げたりすることで、スムーズな加減速動作を実現します。

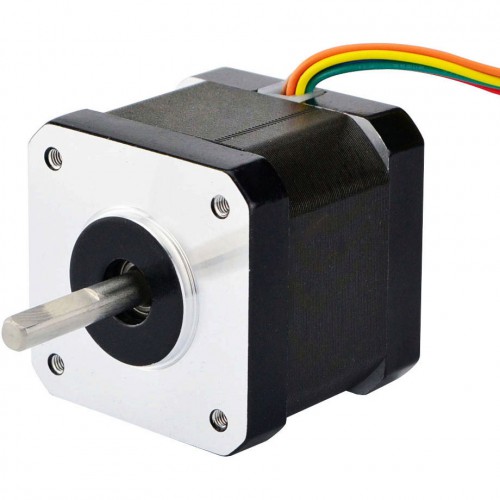
「写真の由来:Nema 17 ユニポーラステッピングモーター 1.8°26Ncm (37oz.in) 0.4A 12V 42x42x39mm 6 ワイヤー」
制御信号のタイミング: ステッピングモータは、ステップパルス信号のタイミングによって回転します。ステップパルス信号をモータの各相に正確に供給することで、モータの速度を制御します。制御信号のタイミングを調整するためには、高精度なタイマや制御回路を使用します。
これらの方法を組み合わせることで、ステッピングモータの速度を制御することができます。具体的な制御方法は、使用するドライバや制御回路の仕様やプログラミング手法によって異なる場合があります。モータの仕様書やメーカーのドキュメンテーションを参照し、適切な速度制御方法を選択してください。
ステップパルス周波数の変更: ステッピングモータは、ステップパルスと呼ばれる信号パルスを受け取り、そのパルスの周波数に応じて回転します。ステップパルスの周波数を変更することで、モータの速度を制御できます。一般的には、ステップパルス周波数を上げると速度が上がり、下げると速度が下がります。

「写真の由来:Sシリーズ 34バイポーラステッピングモーター 34HS45-6004S 1.8°8.2Nm 86x86x114mm 4ワイヤー」
マイクロステップ駆動: ステッピングモータは通常、1ステップごとに固定の角度で回転しますが、マイクロステップ駆動を使用することで、より細かな角度で回転させることができます。マイクロステップ駆動では、ステップパルスをより小さな角度に分割し、モータを滑らかに制御します。より小さな角度での駆動により、速度の微調整が可能となります。
加減速制御: ステッピングモータの速度を制御する際には、加速および減速のフェーズを設定することが一般的です。モータを急激に最高速度に達せずに動かすために、ソフトウェア上でステップパルス周波数を徐々に上げたり下げたりすることで、スムーズな加減速動作を実現します。

「写真の由来:Nema 17 ユニポーラステッピングモーター 1.8°26Ncm (37oz.in) 0.4A 12V 42x42x39mm 6 ワイヤー」
制御信号のタイミング: ステッピングモータは、ステップパルス信号のタイミングによって回転します。ステップパルス信号をモータの各相に正確に供給することで、モータの速度を制御します。制御信号のタイミングを調整するためには、高精度なタイマや制御回路を使用します。
これらの方法を組み合わせることで、ステッピングモータの速度を制御することができます。具体的な制御方法は、使用するドライバや制御回路の仕様やプログラミング手法によって異なる場合があります。モータの仕様書やメーカーのドキュメンテーションを参照し、適切な速度制御方法を選択してください。
Posted by emma at
12:07
│Comments(0)
2023年10月21日
PM型ステッピングモータのメリットとデメリットについて
PM型ステッピングモータは、ステップモータの一種であり、永久磁石を使用していることが特徴です。以下にPM型ステッピングモータのメリットとデメリットを説明します。
メリット:
高トルクと高精度: PM型ステッピングモータは、永久磁石を使用しているため、高いトルクを発生させることができます。また、ステップ角(回転角)が小さく、ステップの位置制御が高精度に行えます。これにより、正確な位置決めや制御が可能となります。

「写真の由来:Φ35x22mm PM型リニアステッピングモータ エクスターナル 0.2A ねじリード0.5mm/0.0197" 長さ21.5mm」
動作が安定している: PM型ステッピングモータは、ステップ角が固定されており、ステップ信号を与えることで確実に一定の角度だけ回転します。この性質により、安定した動作が期待できます。また、ステップ信号の変化に応じて即座に応答するため、応答性も高いです。
高効率: PM型ステッピングモータは、永久磁石を使用することで、高い効率を実現しています。磁界のエネルギーを効率的に変換し、回転力に変えることができます。そのため、エネルギーの消費が少なく、省エネルギーです。
デメリット:
高価: PM型ステッピングモータは、永久磁石を使用しているため、他のステッピングモータに比べて製造コストが高くなる場合があります。特に、高性能や高精度なモータの場合、価格が上昇する傾向があります。

「写真の由来:Φ35x36.2mm PM型ステッピングモーター ギヤ比10.8:1 平行軸ギアボックス付」
低速時の振動や共振: PM型ステッピングモータは、低速回転時に振動や共振現象が発生することがあります。特に、低負荷の状態やモータ自体の構造によっては、振動や騒音が生じることがあります。このため、低速回転時の制御や振動対策が必要となることがあります。
高速回転の制約: PM型ステッピングモータは、高速回転時にはトルクが低下する場合があります。これは、モータ内の永久磁石の特性や回転速度による誘導電流の影響が関与しています。そのため、高速回転が必要な場合は、適切な制御や冷却対策が必要となることがあります。
以上が、PM型ステッピングモータの一般的なメリットとデメリットです。適切な用途や要件に応じて、ステッピングモータの種類や特性を検討することが重要です。
メリット:
高トルクと高精度: PM型ステッピングモータは、永久磁石を使用しているため、高いトルクを発生させることができます。また、ステップ角(回転角)が小さく、ステップの位置制御が高精度に行えます。これにより、正確な位置決めや制御が可能となります。

「写真の由来:Φ35x22mm PM型リニアステッピングモータ エクスターナル 0.2A ねじリード0.5mm/0.0197" 長さ21.5mm」
動作が安定している: PM型ステッピングモータは、ステップ角が固定されており、ステップ信号を与えることで確実に一定の角度だけ回転します。この性質により、安定した動作が期待できます。また、ステップ信号の変化に応じて即座に応答するため、応答性も高いです。
高効率: PM型ステッピングモータは、永久磁石を使用することで、高い効率を実現しています。磁界のエネルギーを効率的に変換し、回転力に変えることができます。そのため、エネルギーの消費が少なく、省エネルギーです。
デメリット:
高価: PM型ステッピングモータは、永久磁石を使用しているため、他のステッピングモータに比べて製造コストが高くなる場合があります。特に、高性能や高精度なモータの場合、価格が上昇する傾向があります。

「写真の由来:Φ35x36.2mm PM型ステッピングモーター ギヤ比10.8:1 平行軸ギアボックス付」
低速時の振動や共振: PM型ステッピングモータは、低速回転時に振動や共振現象が発生することがあります。特に、低負荷の状態やモータ自体の構造によっては、振動や騒音が生じることがあります。このため、低速回転時の制御や振動対策が必要となることがあります。
高速回転の制約: PM型ステッピングモータは、高速回転時にはトルクが低下する場合があります。これは、モータ内の永久磁石の特性や回転速度による誘導電流の影響が関与しています。そのため、高速回転が必要な場合は、適切な制御や冷却対策が必要となることがあります。
以上が、PM型ステッピングモータの一般的なメリットとデメリットです。適切な用途や要件に応じて、ステッピングモータの種類や特性を検討することが重要です。
2023年10月16日
ステッピングモーターは主に何種類に分けられますか?
ステッピングモーターは、いくつかの異なるタイプに分けることができます。以下に一般的なステッピングモーターの種類をいくつか挙げます。
ハイブリッドステッピングモーター(Hybrid Stepper Motor): ハイブリッドステッピングモーターは、ステッピングモーターの主要な種類の一つです。ハイブリッドステッピングモーターは、パーマネントマグネットと巻線(コイル)の組み合わせで構成されており、高いトルクと精密な位置制御が可能です。ハイブリッドステッピングモーターには、バイポーラ型とユニポーラ型の2つのサブタイプがあります。
バイポーラステッピングモーター(Bipolar Stepper Motor): バイポーラステッピングモーターは、4つの線(2つのコイル)で構成されています。バイポーラステッピングモーターは、高いトルクと精密な位置制御を提供するため、多くの応用で使用されます。しかし、ドライバーやコントローラーが必要なため、制御回路がやや複雑になることがあります。

(写真の由来:デュアルシャフト Nema 24 バイポーラ 3.1Nm (439 oz.in) 3.5A 60x60x88mm 4 ワイヤー)
ユニポーラステッピングモーター(Unipolar Stepper Motor): ユニポーラステッピングモーターは、5つの線(4つのコイル)または6つの線(5つのコイル)で構成されています。ユニポーラステッピングモーターは、バイポーラステッピングモーターよりも制御が簡単であり、低コストながらも一定のトルクと位置制御が可能です。しかし、バイポーラステッピングモーターよりも効率が低くなることがあります。

(写真の由来:Nema 17 ユニポーラステッピングモータ 0.9°26Ncm (36.8oz.in) 0.4A 12V 42x39mm 6 ワイヤー)
これらは一般的なステッピングモーターの種類の一部です。また、ステッピングモーターはさらに細分化されることもあり、応用や要件に応じて異なる設計や特性を持つモーターが存在します。
ハイブリッドステッピングモーター(Hybrid Stepper Motor): ハイブリッドステッピングモーターは、ステッピングモーターの主要な種類の一つです。ハイブリッドステッピングモーターは、パーマネントマグネットと巻線(コイル)の組み合わせで構成されており、高いトルクと精密な位置制御が可能です。ハイブリッドステッピングモーターには、バイポーラ型とユニポーラ型の2つのサブタイプがあります。
バイポーラステッピングモーター(Bipolar Stepper Motor): バイポーラステッピングモーターは、4つの線(2つのコイル)で構成されています。バイポーラステッピングモーターは、高いトルクと精密な位置制御を提供するため、多くの応用で使用されます。しかし、ドライバーやコントローラーが必要なため、制御回路がやや複雑になることがあります。

(写真の由来:デュアルシャフト Nema 24 バイポーラ 3.1Nm (439 oz.in) 3.5A 60x60x88mm 4 ワイヤー)
ユニポーラステッピングモーター(Unipolar Stepper Motor): ユニポーラステッピングモーターは、5つの線(4つのコイル)または6つの線(5つのコイル)で構成されています。ユニポーラステッピングモーターは、バイポーラステッピングモーターよりも制御が簡単であり、低コストながらも一定のトルクと位置制御が可能です。しかし、バイポーラステッピングモーターよりも効率が低くなることがあります。
(写真の由来:Nema 17 ユニポーラステッピングモータ 0.9°26Ncm (36.8oz.in) 0.4A 12V 42x39mm 6 ワイヤー)
これらは一般的なステッピングモーターの種類の一部です。また、ステッピングモーターはさらに細分化されることもあり、応用や要件に応じて異なる設計や特性を持つモーターが存在します。
Posted by emma at
12:08
│Comments(0)
2023年10月07日
モータの種類と用途は?
モータは、電気エネルギーを機械的な動力に変換する装置であり、さまざまな種類があります。各種類のモータは、異なる用途に適しています。以下に一部の主要なモータの種類とその用途をいくつか挙げます:
直流モータ(DCモータ):
ファンやポンプ、コンベヤーなどの工業用機械
自動車のウインドウレギュレーターやウィンドシールドワイパーなどの自動車アプリケーション
ロボットやドローンなどの自律移動装置

(写真の由来:NEMA23一体型イージーサーボモータブラシレスDCサーボモーター 90w 3000rpm 0.3Nm(42.49oz.in)20-50VDC)
交流モータ(ACモータ):
家庭用電化製品(冷蔵庫、洗濯機、エアコンなど)
工業用機械(ポンプ、ファン、コンプレッサーなど)
交通機関(電車、電車、電気自動車など)
ステッピングモータ:
プリンターやスキャナーなどのオフィス機器
CNCマシンや3Dプリンターなどの精密な制御が必要な機械
テレスコープや天体望遠鏡などの天文学的装置
サーボモータ:
ロボットアームや産業用ロボットなどの自動化装置
航空機の制御面や自動操縦装置
CNCマシンやロボット工作機械などの精密な位置制御が必要な機械

(写真の由来:Nema 17 バイポーラステッピングモーター 1.8°13Ncm (18.4oz.in) 1A 3.5V 42x42x20mm 4 ワイヤー)
ブラシレスモータ:
電動自転車や電動スクーターなどの交通機関
ドローンやRCモデルなどの航空機
ハードディスクドライブや冷蔵庫の圧縮機などの家電製品
これらは一部のモータの種類とそれぞれの主な用途の例です。モータの種類と用途は幅広く、さまざまな産業や分野で使用されています。各モータの特性や特長に基づいて、特定のアプリケーションに最適なモータを選択することが重要です。
直流モータ(DCモータ):
ファンやポンプ、コンベヤーなどの工業用機械
自動車のウインドウレギュレーターやウィンドシールドワイパーなどの自動車アプリケーション
ロボットやドローンなどの自律移動装置

(写真の由来:NEMA23一体型イージーサーボモータブラシレスDCサーボモーター 90w 3000rpm 0.3Nm(42.49oz.in)20-50VDC)
交流モータ(ACモータ):
家庭用電化製品(冷蔵庫、洗濯機、エアコンなど)
工業用機械(ポンプ、ファン、コンプレッサーなど)
交通機関(電車、電車、電気自動車など)
ステッピングモータ:
プリンターやスキャナーなどのオフィス機器
CNCマシンや3Dプリンターなどの精密な制御が必要な機械
テレスコープや天体望遠鏡などの天文学的装置
サーボモータ:
ロボットアームや産業用ロボットなどの自動化装置
航空機の制御面や自動操縦装置
CNCマシンやロボット工作機械などの精密な位置制御が必要な機械

(写真の由来:Nema 17 バイポーラステッピングモーター 1.8°13Ncm (18.4oz.in) 1A 3.5V 42x42x20mm 4 ワイヤー)
ブラシレスモータ:
電動自転車や電動スクーターなどの交通機関
ドローンやRCモデルなどの航空機
ハードディスクドライブや冷蔵庫の圧縮機などの家電製品
これらは一部のモータの種類とそれぞれの主な用途の例です。モータの種類と用途は幅広く、さまざまな産業や分野で使用されています。各モータの特性や特長に基づいて、特定のアプリケーションに最適なモータを選択することが重要です。