2024年02月17日
ギヤードモータはどのようにして減速を実現しているのでしょうか?
ギヤードモータは、電動モーターと減速機(ギアボックス)が組み合わさった装置であり、減速機能を提供します。以下に、ギヤードモータが減速を実現する方法について説明します。
ギア比の選択:
ギヤードモータでは、モーターの回転数を減速するためにギア比が使用されます。ギア比とは、モーターシャフトと出力シャフトの回転数の比率を示します。例えば、ギア比が10:1の場合、モーターシャフトが1回転すると出力シャフトは10回転します。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=48mmとギヤ比 14:1 遊星ギアボックス」
減速機の構造:
減速機は、複数の歯車(ギア)が組み合わさっている構造です。一般的には、モーターシャフトに取り付けられた小径のギア(ピニオンギア)が、大径のギア(ドライブギア)と噛み合っています。このような組み合わせにより、ピニオンギアの回転数をドライブギアの回転数に比べて減速させることができます。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=33mmとギヤ比5:1遊星ギアボックス」
トルクの変換:
ギヤードモータでは、減速と同時にトルクも変換されます。トルクは力の回転力を表し、ギア比によって変化します。一般的に、ギア比が大きくなるほど、モーターからのトルクは増加します。これにより、モーターがより大きな負荷を動かすことができます。
ギヤードモータは、減速機を介してモーターの回転数とトルクを変換することで、減速を実現します。この仕組みにより、モーターが高速で回転している場合でも、出力シャフトは低速で回転し、大きなトルクを発揮することができます。ギヤードモータは、工業機械や自動車、ロボットなど、さまざまな応用分野で使用されています。
ギア比の選択:
ギヤードモータでは、モーターの回転数を減速するためにギア比が使用されます。ギア比とは、モーターシャフトと出力シャフトの回転数の比率を示します。例えば、ギア比が10:1の場合、モーターシャフトが1回転すると出力シャフトは10回転します。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=48mmとギヤ比 14:1 遊星ギアボックス」
減速機の構造:
減速機は、複数の歯車(ギア)が組み合わさっている構造です。一般的には、モーターシャフトに取り付けられた小径のギア(ピニオンギア)が、大径のギア(ドライブギア)と噛み合っています。このような組み合わせにより、ピニオンギアの回転数をドライブギアの回転数に比べて減速させることができます。

「写真の由来:Nema 17 ステッピングモーターバイポーラ L=33mmとギヤ比5:1遊星ギアボックス」
トルクの変換:
ギヤードモータでは、減速と同時にトルクも変換されます。トルクは力の回転力を表し、ギア比によって変化します。一般的に、ギア比が大きくなるほど、モーターからのトルクは増加します。これにより、モーターがより大きな負荷を動かすことができます。
ギヤードモータは、減速機を介してモーターの回転数とトルクを変換することで、減速を実現します。この仕組みにより、モーターが高速で回転している場合でも、出力シャフトは低速で回転し、大きなトルクを発揮することができます。ギヤードモータは、工業機械や自動車、ロボットなど、さまざまな応用分野で使用されています。
Posted by emma at
15:56
│Comments(0)
2024年02月01日
スイッチング電源は何ですか?
スイッチング電源は、電力を効率的に変換するために設計された電源装置です。通常、交流電源を直流電源に変換するために使用されます。
スイッチング電源は、トランスや整流器、フィルター、スイッチング素子(通常はトランジスタやMOSFET)、制御回路などから構成されています。基本的な原理は、入力電源を高周波で切り替えることにより、トランスやインダクタ、コンデンサなどの周辺部品を使用して電力を変換するというものです。

「写真の由来:SE-600-24 MEAN WELL 600W 25A 24V スイッチング電源/ CNC 電源」
スイッチング電源には、いくつかの利点があります。
高効率: スイッチング電源は、トランスやインダクタなどの周辺部品を使用して電力を変換するため、通常、高い電力効率を実現します。これは、電力の変換プロセスで発生する損失を最小限に抑えることによるものです。
コンパクトなサイズ: スイッチング電源は、高周波で動作するため、トランスやインダクタのサイズや重量を小さくすることができます。そのため、同じ出力を持つ場合でも、スイッチング電源は従来のトランス駆動の電源よりもコンパクトになります。

「写真の由来:MeanWell® LRS-75-12 75W 12VDC 6A 115/230VAC 密閉型スイッチング電源」
変換可能な入力電圧範囲: スイッチング電源は、一般的に広範な入力電圧範囲に対応することができます。これにより、異なる地域や電力環境で使用する際に便利です。
安定した出力: スイッチング電源は、制御回路によって安定した出力電圧や電流を提供することができます。また、フィードバック制御回路を使用することで、出力の安定性や保護機能を追加することも可能です。
スイッチング電源は、家庭用電化製品、コンピュータ、通信機器、産業用機器など、さまざまな電子機器で広く使用されています。効率的な電力変換とコンパクトなサイズの利点から、スイッチング電源は現代の電子機器において重要な役割を果たしています。
スイッチング電源は、トランスや整流器、フィルター、スイッチング素子(通常はトランジスタやMOSFET)、制御回路などから構成されています。基本的な原理は、入力電源を高周波で切り替えることにより、トランスやインダクタ、コンデンサなどの周辺部品を使用して電力を変換するというものです。

「写真の由来:SE-600-24 MEAN WELL 600W 25A 24V スイッチング電源/ CNC 電源」
スイッチング電源には、いくつかの利点があります。
高効率: スイッチング電源は、トランスやインダクタなどの周辺部品を使用して電力を変換するため、通常、高い電力効率を実現します。これは、電力の変換プロセスで発生する損失を最小限に抑えることによるものです。
コンパクトなサイズ: スイッチング電源は、高周波で動作するため、トランスやインダクタのサイズや重量を小さくすることができます。そのため、同じ出力を持つ場合でも、スイッチング電源は従来のトランス駆動の電源よりもコンパクトになります。

「写真の由来:MeanWell® LRS-75-12 75W 12VDC 6A 115/230VAC 密閉型スイッチング電源」
変換可能な入力電圧範囲: スイッチング電源は、一般的に広範な入力電圧範囲に対応することができます。これにより、異なる地域や電力環境で使用する際に便利です。
安定した出力: スイッチング電源は、制御回路によって安定した出力電圧や電流を提供することができます。また、フィードバック制御回路を使用することで、出力の安定性や保護機能を追加することも可能です。
スイッチング電源は、家庭用電化製品、コンピュータ、通信機器、産業用機器など、さまざまな電子機器で広く使用されています。効率的な電力変換とコンパクトなサイズの利点から、スイッチング電源は現代の電子機器において重要な役割を果たしています。
Posted by emma at
16:01
│Comments(0)
2024年01月24日
モータドライバはどんな部分で構造されていますか?
モータドライバは、主に以下の部分で構成されています:
パワーモスフェットまたはパワートランジスタ:モータドライバの主要な部品であり、モーターに電力を供給する役割を果たします。パワーモスフェットまたはパワートランジスタは、高電流および高電圧を制御するために設計されています。
制御回路:モータドライバには、モーターの回転方向や速度を制御する回路が含まれています。これには、PWM(パルス幅変調)信号を生成するための制御ICやマイクロコントローラが含まれることがあります。

「写真の由来:Leadshine デジタルステッピングドライバ 3DM580S 20-74VDC 0.5-8.0A (3相 Nema 17、23、24、34ステップモーターに適合)」
電流検出回路:モータドライバは、モーターへの電流を監視するための電流検出回路を備えています。これにより、過電流や短絡などの異常を検出し、保護機能を実行することができます。
保護回路:モータドライバは、モーターやドライバ自体を保護するためのさまざまな保護回路を備えています。これには、過電流保護、過熱保護、過電圧保護、低電圧保護などが含まれます。
インターフェース回路:モータドライバは、外部からの制御信号を受け付けるためのインターフェース回路を備えています。一般的なインターフェースには、PWM信号、デジタル入力、アナログ入力、シリアル通信(SPIやI2C)などがあります。

「写真の由来:ステッピングモータドライバー 2.4-7.2A 最大 80VAC或いは110VDC」
電源回路:モータドライバは、適切な電源電圧を供給するための電源回路を備えています。これには、電源フィルタリング、電圧レギュレーション、電源保護回路などが含まれます。
これらの部分が組み合わさって、モータドライバはモーターの制御と保護を行います。モータドライバの具体的な構造や機能は、製品の種類や応用によって異なる場合があります。
パワーモスフェットまたはパワートランジスタ:モータドライバの主要な部品であり、モーターに電力を供給する役割を果たします。パワーモスフェットまたはパワートランジスタは、高電流および高電圧を制御するために設計されています。
制御回路:モータドライバには、モーターの回転方向や速度を制御する回路が含まれています。これには、PWM(パルス幅変調)信号を生成するための制御ICやマイクロコントローラが含まれることがあります。

「写真の由来:Leadshine デジタルステッピングドライバ 3DM580S 20-74VDC 0.5-8.0A (3相 Nema 17、23、24、34ステップモーターに適合)」
電流検出回路:モータドライバは、モーターへの電流を監視するための電流検出回路を備えています。これにより、過電流や短絡などの異常を検出し、保護機能を実行することができます。
保護回路:モータドライバは、モーターやドライバ自体を保護するためのさまざまな保護回路を備えています。これには、過電流保護、過熱保護、過電圧保護、低電圧保護などが含まれます。
インターフェース回路:モータドライバは、外部からの制御信号を受け付けるためのインターフェース回路を備えています。一般的なインターフェースには、PWM信号、デジタル入力、アナログ入力、シリアル通信(SPIやI2C)などがあります。

「写真の由来:ステッピングモータドライバー 2.4-7.2A 最大 80VAC或いは110VDC」
電源回路:モータドライバは、適切な電源電圧を供給するための電源回路を備えています。これには、電源フィルタリング、電圧レギュレーション、電源保護回路などが含まれます。
これらの部分が組み合わさって、モータドライバはモーターの制御と保護を行います。モータドライバの具体的な構造や機能は、製品の種類や応用によって異なる場合があります。
Posted by emma at
16:22
│Comments(0)
2024年01月18日
リニアステッピングモータとは何?その特徴は?
リニアステッピングモータ(Linear Stepping Motor)は、ステッピングモータの一種であり、回転運動ではなく直線運動を実現するために設計されたモータです。以下に、リニアステッピングモータの主な特徴を説明します。
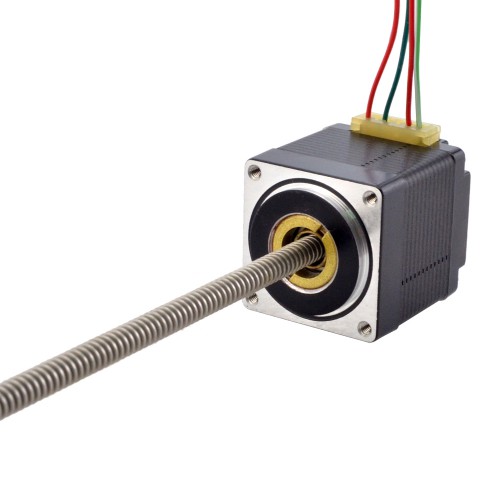
直線運動: リニアステッピングモータは、回転運動ではなく直線運動を提供します。これにより、直線的な移動や位置制御が必要なアプリケーションに適しています。例えば、印刷業界の印刷ヘッドの移動や産業用機械の精密な位置決めなどに使用されます。

「写真の由来:NEMA 11 ノンキャプティブリニアステッピングモータ 11N13S1004FD5-200RS 1.0A 0.06Nm ねじリード4.877mm/0.192" 長さ150mm」
ステップモーション: リニアステッピングモータは、ステップモーションと呼ばれる連続したステップ動作を通じて移動します。各ステップは、モータのコイルにパルス信号を送ることで発生し、特定の距離を移動します。このステップモーションにより、精密な位置決めと制御が可能になります。
高分解能と正確性: リニアステッピングモータは、ステップ角度やピッチに基づいて位置が制御されるため、高い分解能と正確性を実現します。ステップ角度が小さいほど、より細かい位置制御が可能です。このため、微細な移動や高精度な位置決めが求められるアプリケーションに適しています。

「写真の由来:NEMA 11 キャプティブリニアステッピングモータ 1.0A 11C18S1004GD5-025RS 0.1Nm ねじリード2.54mm(0.1") 長さ 25.4mm」
高トルク: リニアステッピングモータは、高いトルクを発生することができます。各ステップにおいて安定したトルクを提供し、負荷に対して安定した力を発揮します。この特性により、リニアステッピングモータは垂直方向の負荷や抵抗に対しても効果的に動作します。
高い応答性とダイレクトドライブ: リニアステッピングモータは、パルス信号に応答して即座に移動することができます。また、リニアガイドやベルトなどのトランスミッション部品を介さず、負荷を直接駆動することができるため、応答性と効率性が高いと言えます。
これらの特徴により、リニアステッピングモータは、直線運動や位置制御が必要なアプリケーションに広く使用されます。例としては、3Dプリンター、医療機器、ロボット工学、自動化装置などがあります。
直線運動: リニアステッピングモータは、回転運動ではなく直線運動を提供します。これにより、直線的な移動や位置制御が必要なアプリケーションに適しています。例えば、印刷業界の印刷ヘッドの移動や産業用機械の精密な位置決めなどに使用されます。
「写真の由来:NEMA 11 ノンキャプティブリニアステッピングモータ 11N13S1004FD5-200RS 1.0A 0.06Nm ねじリード4.877mm/0.192" 長さ150mm」
ステップモーション: リニアステッピングモータは、ステップモーションと呼ばれる連続したステップ動作を通じて移動します。各ステップは、モータのコイルにパルス信号を送ることで発生し、特定の距離を移動します。このステップモーションにより、精密な位置決めと制御が可能になります。
高分解能と正確性: リニアステッピングモータは、ステップ角度やピッチに基づいて位置が制御されるため、高い分解能と正確性を実現します。ステップ角度が小さいほど、より細かい位置制御が可能です。このため、微細な移動や高精度な位置決めが求められるアプリケーションに適しています。

「写真の由来:NEMA 11 キャプティブリニアステッピングモータ 1.0A 11C18S1004GD5-025RS 0.1Nm ねじリード2.54mm(0.1") 長さ 25.4mm」
高トルク: リニアステッピングモータは、高いトルクを発生することができます。各ステップにおいて安定したトルクを提供し、負荷に対して安定した力を発揮します。この特性により、リニアステッピングモータは垂直方向の負荷や抵抗に対しても効果的に動作します。
高い応答性とダイレクトドライブ: リニアステッピングモータは、パルス信号に応答して即座に移動することができます。また、リニアガイドやベルトなどのトランスミッション部品を介さず、負荷を直接駆動することができるため、応答性と効率性が高いと言えます。
これらの特徴により、リニアステッピングモータは、直線運動や位置制御が必要なアプリケーションに広く使用されます。例としては、3Dプリンター、医療機器、ロボット工学、自動化装置などがあります。
Posted by emma at
15:41
│Comments(0)
2024年01月10日
中空ステッピングモータは何ができますか?
中空ステッピングモーターは、ステッピングモーターの一種であり、中空の回転軸を持つ特殊な設計のモーターです。中空ステッピングモーターは、その中心部にシャフトやワイヤー、パイプなどが通過できるようになっており、これによりさまざまなアプリケーションで特別な機能を提供します。以下に、中空ステッピングモーターの主な機能と利用例をいくつか挙げます。
内部配線やパイプの通過: 中空ステッピングモーターの中心部には、シャフトやワイヤー、パイプなどを通過させることができます。これにより、モーターの回転軸を通じて信号線やケーブル、冷却水などを伝送することができます。例えば、ロボットアームや回転テーブルなどのアプリケーションで、内部配線や冷却液の供給を効率的に行うことができます。

「写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 16Ncm (22.66oz.in) 1.25A 35x35x35mm」
パッケージングや設計の軽量化: 中空ステッピングモーターは、中心部が空洞であるため、モーター自体の重量や大きさを軽減することができます。これにより、機械や装置の設計において、重量やスペースの制約がある場合でも効果的に利用できます。
ロータリージョイントの実現: 中空ステッピングモーターは、回転軸を通じて内部の部品やデバイスと連結することができます。これにより、回転軸を介して機械的な連結や電気信号の伝達を行うことができます。例えば、カメラやセンサーを回転軸に取り付け、連続した回転運動中に信号や映像を伝えることができます。

「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 1.45 Nm(205.38oz.in) 2.0A 57x57x65mm」
パン・チルト機構: 中空ステッピングモーターを使用して、パン・チルト機構を実現することができます。パン・チルト機構は、カメラやセンサーなどのデバイスを水平方向と垂直方向に回転・傾斜させる機能を指します。これにより、監視カメラや航空写真撮影などで広範囲の視野をカバーすることができます。
中空ステッピングモーターは、さまざまなアプリケーションで特殊な機能を提供するため、産業用ロボット、カメラシステム、医療機器、半導体製造装置など、幅広い分野で使用されています。
内部配線やパイプの通過: 中空ステッピングモーターの中心部には、シャフトやワイヤー、パイプなどを通過させることができます。これにより、モーターの回転軸を通じて信号線やケーブル、冷却水などを伝送することができます。例えば、ロボットアームや回転テーブルなどのアプリケーションで、内部配線や冷却液の供給を効率的に行うことができます。

「写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 16Ncm (22.66oz.in) 1.25A 35x35x35mm」
パッケージングや設計の軽量化: 中空ステッピングモーターは、中心部が空洞であるため、モーター自体の重量や大きさを軽減することができます。これにより、機械や装置の設計において、重量やスペースの制約がある場合でも効果的に利用できます。
ロータリージョイントの実現: 中空ステッピングモーターは、回転軸を通じて内部の部品やデバイスと連結することができます。これにより、回転軸を介して機械的な連結や電気信号の伝達を行うことができます。例えば、カメラやセンサーを回転軸に取り付け、連続した回転運動中に信号や映像を伝えることができます。

「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 1.45 Nm(205.38oz.in) 2.0A 57x57x65mm」
パン・チルト機構: 中空ステッピングモーターを使用して、パン・チルト機構を実現することができます。パン・チルト機構は、カメラやセンサーなどのデバイスを水平方向と垂直方向に回転・傾斜させる機能を指します。これにより、監視カメラや航空写真撮影などで広範囲の視野をカバーすることができます。
中空ステッピングモーターは、さまざまなアプリケーションで特殊な機能を提供するため、産業用ロボット、カメラシステム、医療機器、半導体製造装置など、幅広い分野で使用されています。
Posted by emma at
15:46
│Comments(0)
2024年01月04日
ユニポーラステッピングモータの配線について
ユニポーラステッピングモータの配線方法は、モータのタイプやドライバの接続方式によって異なる場合があります。以下では、一般的なユニポーラステッピングモータの配線方法について説明します。
ユニポーラステッピングモータは、通常、4つの線(A+、A-、B+、B-)で構成されています。これらの線を適切に接続することで、モータを制御します。

「写真の由来:Nema 23 ユニポーラステッピングモータ 1.8°90Ncm (127.5oz.in) 1A 7.4V 57x57x56mm 6 ワイヤー」
以下に、ユニポーラステッピングモータの配線の一般的な方法を示します。
モータの線の識別: モータの線を識別するために、マルチメーターやモータの仕様書を使用して、各線の正しい識別子(A+、A-、B+、B-)を確認します。
ドライバの接続: ユニポーラステッピングモータを制御するためには、適切なドライバが必要です。ドライバには、各モータ線を接続するための端子があります。一般的なドライバでは、A+、A-、B+、B-の4つの端子が用意されています。
モータの線とドライバの接続: モータの線とドライバの接続を行います。一般的な接続方法は以下の通りです。
A+線をドライバのA+端子に接続します。
A-線をドライバのA-端子に接続します。
B+線をドライバのB+端子に接続します。
B-線をドライバのB-端子に接続します。
電源の接続: ドライバには、電源を供給する必要があります。ドライバの電源端子に正しい電圧(仕様に基づいた電源電圧)を接続します。また、GND端子と共通の接地点にも接続します。

「写真の由来:Nema 17 ユニポーラステッピングモータ 1.8°65Ncm (92oz.in) 1.2A 7.2V 42x42x60mm 6 ワイヤー」
制御信号の接続: ドライバは、制御信号を受け取ることでモータを制御します。制御信号は、マイクロコントローラやステップパルスジェネレータから供給されます。ドライバの制御端子に対応する制御信号を接続します。一般的な接続は、パルス信号(ステップ信号)をSTEP端子に接続し、方向信号(回転方向)をDIR端子に接続する方法です。
以上が一般的なユニポーラステッピングモータの配線方法です。ただし、モータやドライバの仕様によっては、接続方法が異なる場合があります。モータとドライバの仕様書やマニュアルを参照し、正確な配線手順を確認することをおすすめします。また、電源や制御信号の接続においては、適切な電圧や極性を守るように注意してください。
ユニポーラステッピングモータは、通常、4つの線(A+、A-、B+、B-)で構成されています。これらの線を適切に接続することで、モータを制御します。

「写真の由来:Nema 23 ユニポーラステッピングモータ 1.8°90Ncm (127.5oz.in) 1A 7.4V 57x57x56mm 6 ワイヤー」
以下に、ユニポーラステッピングモータの配線の一般的な方法を示します。
モータの線の識別: モータの線を識別するために、マルチメーターやモータの仕様書を使用して、各線の正しい識別子(A+、A-、B+、B-)を確認します。
ドライバの接続: ユニポーラステッピングモータを制御するためには、適切なドライバが必要です。ドライバには、各モータ線を接続するための端子があります。一般的なドライバでは、A+、A-、B+、B-の4つの端子が用意されています。
モータの線とドライバの接続: モータの線とドライバの接続を行います。一般的な接続方法は以下の通りです。
A+線をドライバのA+端子に接続します。
A-線をドライバのA-端子に接続します。
B+線をドライバのB+端子に接続します。
B-線をドライバのB-端子に接続します。
電源の接続: ドライバには、電源を供給する必要があります。ドライバの電源端子に正しい電圧(仕様に基づいた電源電圧)を接続します。また、GND端子と共通の接地点にも接続します。

「写真の由来:Nema 17 ユニポーラステッピングモータ 1.8°65Ncm (92oz.in) 1.2A 7.2V 42x42x60mm 6 ワイヤー」
制御信号の接続: ドライバは、制御信号を受け取ることでモータを制御します。制御信号は、マイクロコントローラやステップパルスジェネレータから供給されます。ドライバの制御端子に対応する制御信号を接続します。一般的な接続は、パルス信号(ステップ信号)をSTEP端子に接続し、方向信号(回転方向)をDIR端子に接続する方法です。
以上が一般的なユニポーラステッピングモータの配線方法です。ただし、モータやドライバの仕様によっては、接続方法が異なる場合があります。モータとドライバの仕様書やマニュアルを参照し、正確な配線手順を確認することをおすすめします。また、電源や制御信号の接続においては、適切な電圧や極性を守るように注意してください。
Posted by emma at
15:29
│Comments(0)
2023年12月26日
一体型サーボモータの応用分野
一体型サーボモータは、モータ、エンコーダ、制御回路が一体化された装置であり、高性能な位置制御と速度制御を提供します。以下に一体型サーボモータの主な応用分野のいくつかを示します:
ロボット工業: 一体型サーボモータは、ロボットアームや産業用ロボットに広く使用されています。高精度な位置制御とトルク制御が要求されるため、サーボモータの高い応答性と制御性能が必要です。ロボット工業では、一体型サーボモータが動作の正確性と安定性を確保する役割を果たしています。

「写真の由来:ショートシャフト NEMA 23 一体型サーボモータ iSV57T-130S 130W 3000rpm 0.45Nm 20-50VDC」
CNC機械: CNCルーター、フライス盤、旋盤などの工作機械においても、一体型サーボモータが利用されます。これらの機械では高速かつ高精度な位置制御が求められるため、サーボモータの優れたトルク特性と制御能力が重要です。一体型サーボモータは、高い加工品質と生産性向上に貢献します。
自動車産業: 自動車産業でも一体型サーボモータが使用されています。例えば、ステアリングシステムにおいては、高い応答性と正確な位置制御が必要とされます。一体型サーボモータは、車両の操舵制御を高い精度で実現し、安全性と運転性能を向上させます。

「写真の由来:ショートシャフト NEMA 23 一体型サーボモータ iSV57T-180S 180w 3000rpm 0.6Nm 20-50VDC」
医療機器: 医療機器においても一体型サーボモータが利用されます。例えば、手術用ロボットや画像診断装置など、高精度な動作制御が必要な装置に適しています。一体型サーボモータは、医療技術の進歩と精密な処置を支える役割を果たします。
航空宇宙産業: 航空宇宙産業においても一体型サーボモータが重要な役割を果たしています。航空機の制御面や航法装置、衛星の位置制御など、高い信頼性と精度が求められます。一体型サーボモータは、航空宇宙分野の厳しい要件に適合し、安全性と性能を確保します。
これらは一部の応用分野の例ですが、一体型サーボモータは多くの産業分野で使用され、高精度な位置制御と動作性能を提供することで、自動化や制御技術の進歩に貢献しています。
ロボット工業: 一体型サーボモータは、ロボットアームや産業用ロボットに広く使用されています。高精度な位置制御とトルク制御が要求されるため、サーボモータの高い応答性と制御性能が必要です。ロボット工業では、一体型サーボモータが動作の正確性と安定性を確保する役割を果たしています。

「写真の由来:ショートシャフト NEMA 23 一体型サーボモータ iSV57T-130S 130W 3000rpm 0.45Nm 20-50VDC」
CNC機械: CNCルーター、フライス盤、旋盤などの工作機械においても、一体型サーボモータが利用されます。これらの機械では高速かつ高精度な位置制御が求められるため、サーボモータの優れたトルク特性と制御能力が重要です。一体型サーボモータは、高い加工品質と生産性向上に貢献します。
自動車産業: 自動車産業でも一体型サーボモータが使用されています。例えば、ステアリングシステムにおいては、高い応答性と正確な位置制御が必要とされます。一体型サーボモータは、車両の操舵制御を高い精度で実現し、安全性と運転性能を向上させます。

「写真の由来:ショートシャフト NEMA 23 一体型サーボモータ iSV57T-180S 180w 3000rpm 0.6Nm 20-50VDC」
医療機器: 医療機器においても一体型サーボモータが利用されます。例えば、手術用ロボットや画像診断装置など、高精度な動作制御が必要な装置に適しています。一体型サーボモータは、医療技術の進歩と精密な処置を支える役割を果たします。
航空宇宙産業: 航空宇宙産業においても一体型サーボモータが重要な役割を果たしています。航空機の制御面や航法装置、衛星の位置制御など、高い信頼性と精度が求められます。一体型サーボモータは、航空宇宙分野の厳しい要件に適合し、安全性と性能を確保します。
これらは一部の応用分野の例ですが、一体型サーボモータは多くの産業分野で使用され、高精度な位置制御と動作性能を提供することで、自動化や制御技術の進歩に貢献しています。
Posted by emma at
15:14
│Comments(0)
2023年12月18日
バイポーラステッピングモータの速度制御
バイポーラステッピングモータの速度制御は、ステップパルスの周波数やパルス列のパターンを変化させることで実現されます。以下に一般的な方法をいくつか説明します。
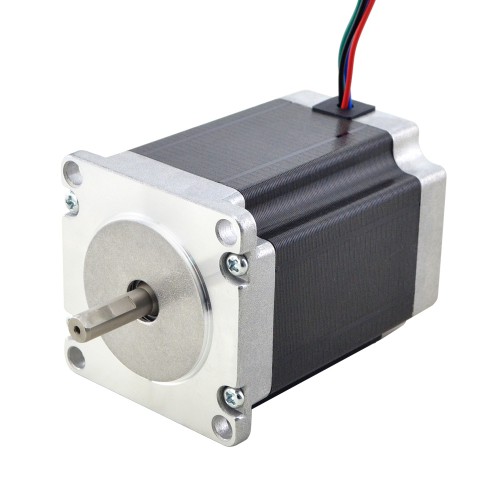
ステップパルス周波数の調整: ステップパルスの周波数を変更することにより、モータの回転速度を制御することができます。ステップパルスの周波数を高くすると、モータはより高速に回転します。逆に、周波数を低くすると、モータの回転速度は遅くなります。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
パルス列のパターン変更: パルス列のパターンを変更することにより、ステッピングモータの速度を制御することも可能です。例えば、フルステップ駆動やハーフステップ駆動などの異なる駆動パターンを使用することで、モータの速度を調整することができます。ハーフステップ駆動では、ステップごとの角度が半分になり、より滑らかな回転が実現されます。
モータドライバの制御: バイポーラステッピングモータは、専用のモータドライバによって制御されます。モータドライバは、ステップパルスの供給や駆動電流の制御を行います。速度制御のためには、適切な制御信号をモータドライバに与える必要があります。一般的には、マイクロコントローラや制御回路を使用して、モータドライバに速度制御の指示を送ります。

「写真の由来:Nema 23 バイポーラ 3Nm (425oz.in) 4.2A 57x57x114mm 4 ワイヤー CNC ステッピングモーター」
加速・減速制御: 高度な速度制御を実現するためには、加速および減速制御も重要です。ステッピングモータは一定の速度で回転するだけでなく、指定された速度まで加速し、指定された速度まで減速することも可能です。この場合、モータドライバや制御回路は、適切なタイミングで速度を変化させるための制御信号を生成します。
これらの方法を組み合わせることで、バイポーラステッピングモータの速度を効果的に制御することができます。ただし、具体的な速度制御方法は使用するモータドライバや制御システムによって異なる場合があります。したがって、モータドライバのデータシートや製造元の指示に従って適切な速度制御方法を選択する必要があります。
ステップパルス周波数の調整: ステップパルスの周波数を変更することにより、モータの回転速度を制御することができます。ステップパルスの周波数を高くすると、モータはより高速に回転します。逆に、周波数を低くすると、モータの回転速度は遅くなります。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
パルス列のパターン変更: パルス列のパターンを変更することにより、ステッピングモータの速度を制御することも可能です。例えば、フルステップ駆動やハーフステップ駆動などの異なる駆動パターンを使用することで、モータの速度を調整することができます。ハーフステップ駆動では、ステップごとの角度が半分になり、より滑らかな回転が実現されます。
モータドライバの制御: バイポーラステッピングモータは、専用のモータドライバによって制御されます。モータドライバは、ステップパルスの供給や駆動電流の制御を行います。速度制御のためには、適切な制御信号をモータドライバに与える必要があります。一般的には、マイクロコントローラや制御回路を使用して、モータドライバに速度制御の指示を送ります。

「写真の由来:Nema 23 バイポーラ 3Nm (425oz.in) 4.2A 57x57x114mm 4 ワイヤー CNC ステッピングモーター」
加速・減速制御: 高度な速度制御を実現するためには、加速および減速制御も重要です。ステッピングモータは一定の速度で回転するだけでなく、指定された速度まで加速し、指定された速度まで減速することも可能です。この場合、モータドライバや制御回路は、適切なタイミングで速度を変化させるための制御信号を生成します。
これらの方法を組み合わせることで、バイポーラステッピングモータの速度を効果的に制御することができます。ただし、具体的な速度制御方法は使用するモータドライバや制御システムによって異なる場合があります。したがって、モータドライバのデータシートや製造元の指示に従って適切な速度制御方法を選択する必要があります。
Posted by emma at
12:28
│Comments(0)
2023年12月12日
ギヤードモータはどのような場合に使用されますか?
ギヤードモータは、その特性からさまざまな場面で使用されます。以下に、ギヤードモータの主な使用場合をいくつか挙げます:
トルク増幅: ギヤードモータは、モータの出力トルクを増幅するために使用されます。モータが提供するトルクをギア機構を介して増幅することで、より大きな負荷を扱うことができます。このため、工業用機械やロボットアームなど、高いトルクが求められる応用で使用されます。

「写真の由来:Nema 14 ステッピングモーターバイポーラ L=51mmとギヤ比5:1遊星ギアボックス」
速度制御: ギヤードモータは、ギア比を調整することで出力速度を制御することができます。ギア比によってモータの回転速度を変えることで、異なる速度要件に対応することができます。例えば、コンベヤシステムや自動車のドライブトレインなど、異なる速度制御が必要な応用で使用されます。
位置制御: ギヤードモータは、高い減速比を持つことで高精度な位置制御を実現することができます。減速比によって、モータの回転を精密に制御し、特定の位置に正確に移動することができます。ロボットアームや産業用マシンなど、位置制御が重要な応用で使用されます。

「写真の由来:Nema 11 ステッピングモーターバイポーラ L=45mmとギヤ比5:1遊星ギアボックス」
逆起電力の利用: ギヤードモータは、逆起電力を効果的に利用することができます。モータの回転エネルギーを逆起電力として回収し、エネルギー効率を向上させることができます。特にブレーキングやエネルギー回生が必要な応用で使用されます。
空間制約: ギヤードモータは、コンパクトな設計でありながら高いトルクを提供することができます。そのため、スペースの制約がある応用や機器に最適です。例えば、自動ドアや監視カメラのパン・チルト機構など、スペースが限られている場所で使用されることがあります。
これらは一般的な使用例ですが、ギヤードモータはさまざまな応用で使用される汎用的なモータです。具体的な応用においては、要件や設計上の制約に基づいて適切なギヤードモータを選択する必要があります。
トルク増幅: ギヤードモータは、モータの出力トルクを増幅するために使用されます。モータが提供するトルクをギア機構を介して増幅することで、より大きな負荷を扱うことができます。このため、工業用機械やロボットアームなど、高いトルクが求められる応用で使用されます。

「写真の由来:Nema 14 ステッピングモーターバイポーラ L=51mmとギヤ比5:1遊星ギアボックス」
速度制御: ギヤードモータは、ギア比を調整することで出力速度を制御することができます。ギア比によってモータの回転速度を変えることで、異なる速度要件に対応することができます。例えば、コンベヤシステムや自動車のドライブトレインなど、異なる速度制御が必要な応用で使用されます。
位置制御: ギヤードモータは、高い減速比を持つことで高精度な位置制御を実現することができます。減速比によって、モータの回転を精密に制御し、特定の位置に正確に移動することができます。ロボットアームや産業用マシンなど、位置制御が重要な応用で使用されます。

「写真の由来:Nema 11 ステッピングモーターバイポーラ L=45mmとギヤ比5:1遊星ギアボックス」
逆起電力の利用: ギヤードモータは、逆起電力を効果的に利用することができます。モータの回転エネルギーを逆起電力として回収し、エネルギー効率を向上させることができます。特にブレーキングやエネルギー回生が必要な応用で使用されます。
空間制約: ギヤードモータは、コンパクトな設計でありながら高いトルクを提供することができます。そのため、スペースの制約がある応用や機器に最適です。例えば、自動ドアや監視カメラのパン・チルト機構など、スペースが限られている場所で使用されることがあります。
これらは一般的な使用例ですが、ギヤードモータはさまざまな応用で使用される汎用的なモータです。具体的な応用においては、要件や設計上の制約に基づいて適切なギヤードモータを選択する必要があります。
Posted by emma at
11:31
│Comments(0)
2023年12月04日
高温ステッピングモーターとは?
高温ステッピングモーターは、高温環境での動作に適したステッピングモーターの一種です。通常のステッピングモーターは、一般的には室温やそれに近い温度での使用が前提とされていますが、高温ステッピングモーターは、より高温な環境下でも安定して動作する能力を持っています。
高温ステッピングモーターは、特殊な材料や設計によって高温に耐えるように作られています。一般的なステッピングモーターでは、高温ではモーター内の部品や磁性体の特性が変化し、性能の低下や故障の原因となる可能性がありますが、高温ステッピングモーターはこのような課題を克服するための対策が施されています。

「写真の由来:Nema 23 高温耐性ステッピング モーター 23HS30-2804S-H 1.85Nm 絶縁クラスH 180C」
高温ステッピングモーターは、主に高温環境下での産業用途に使用されます。例えば、鋳造や溶接、ガラス製造、金属加工などのプロセス制御や機械装置の駆動に利用されます。これらの産業では、高温や熱の発生が激しい環境下での動作が必要であり、通常のモーターでは耐えられないことがあります。
高温ステッピングモーターは、高温に耐えるための特殊な材料や冷却システムを備えており、高温下でも高い精度と信頼性を保つことができます。また、高温環境での動作においても、ステッピングモーターの特性である正確な位置制御や高トルクの特性を維持することができます。

「写真の由来:Nema 17 高温ステッピングモーター 17HS24-2104S-H 65Ncm 絶縁クラスH 180C」
ただし、高温ステッピングモーターは通常のステッピングモーターよりも高価である場合があり、特殊な環境での使用に限定されることがあります。また、高温環境における適切な冷却や保護対策が必要となるため、適切な設置やメンテナンスが求められます。
高温ステッピングモーターは、厳しい高温環境下での動作が必要な産業やアプリケーションにおいて、信頼性とパフォーマンスを提供する重要なコンポーネントです。
高温ステッピングモーターは、特殊な材料や設計によって高温に耐えるように作られています。一般的なステッピングモーターでは、高温ではモーター内の部品や磁性体の特性が変化し、性能の低下や故障の原因となる可能性がありますが、高温ステッピングモーターはこのような課題を克服するための対策が施されています。
「写真の由来:Nema 23 高温耐性ステッピング モーター 23HS30-2804S-H 1.85Nm 絶縁クラスH 180C」
高温ステッピングモーターは、主に高温環境下での産業用途に使用されます。例えば、鋳造や溶接、ガラス製造、金属加工などのプロセス制御や機械装置の駆動に利用されます。これらの産業では、高温や熱の発生が激しい環境下での動作が必要であり、通常のモーターでは耐えられないことがあります。
高温ステッピングモーターは、高温に耐えるための特殊な材料や冷却システムを備えており、高温下でも高い精度と信頼性を保つことができます。また、高温環境での動作においても、ステッピングモーターの特性である正確な位置制御や高トルクの特性を維持することができます。

「写真の由来:Nema 17 高温ステッピングモーター 17HS24-2104S-H 65Ncm 絶縁クラスH 180C」
ただし、高温ステッピングモーターは通常のステッピングモーターよりも高価である場合があり、特殊な環境での使用に限定されることがあります。また、高温環境における適切な冷却や保護対策が必要となるため、適切な設置やメンテナンスが求められます。
高温ステッピングモーターは、厳しい高温環境下での動作が必要な産業やアプリケーションにおいて、信頼性とパフォーマンスを提供する重要なコンポーネントです。
Posted by emma at
11:34
│Comments(0)